

A spatial positioning method of tower crane based on machine vision
A space positioning and machine vision technology, applied in the direction of instruments, load hanging components, image data processing, etc., can solve the problems of not being able to fully observe the surrounding environment of the construction site, increasing potential safety hazards, increasing construction costs, etc. , to facilitate calculation, reduce potential safety hazards, and save construction costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] A machine vision-based tower crane space positioning method, comprising the following steps:
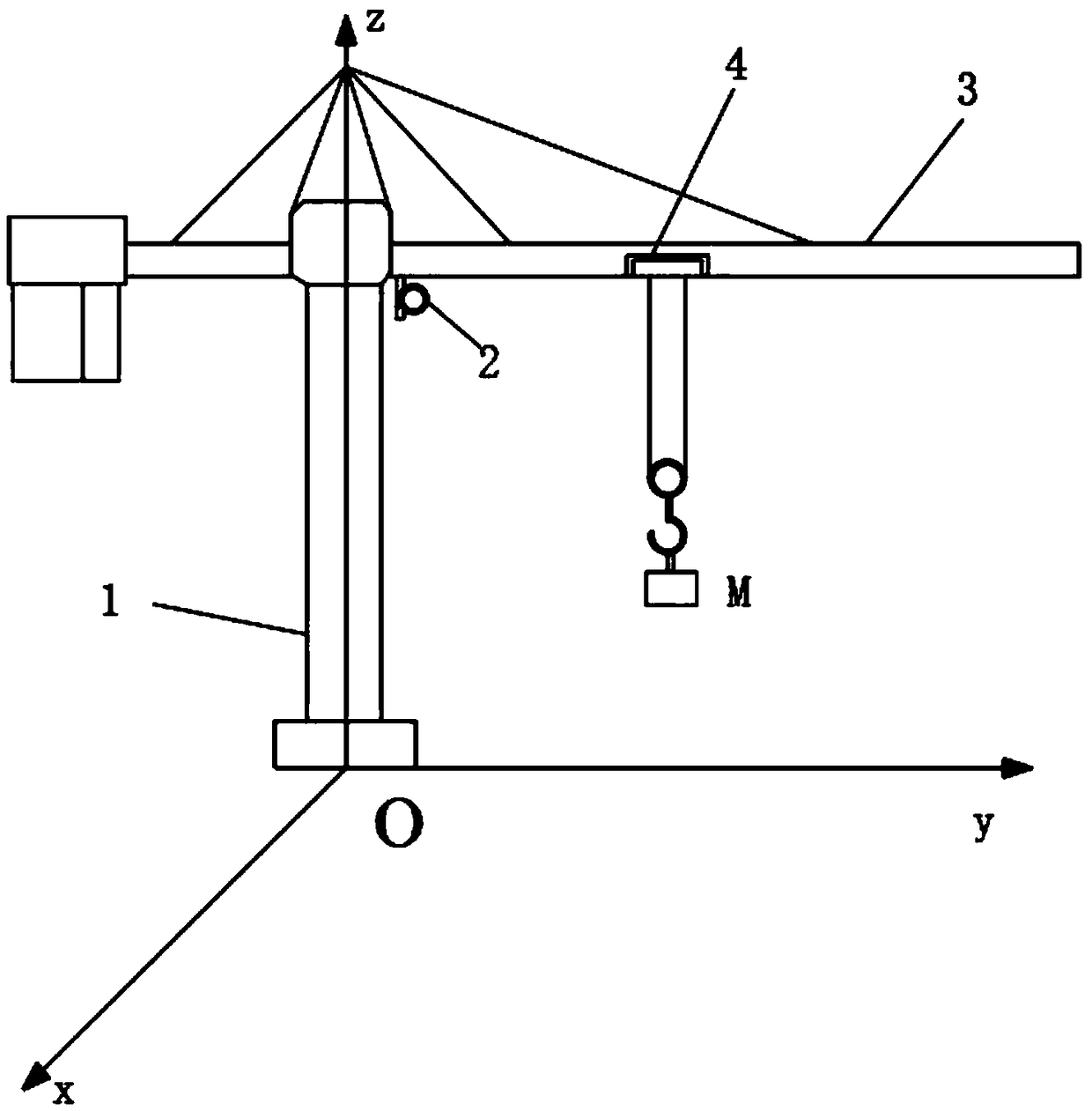
[0042] S10, set up as figure 1 The spatial coordinate system shown.
[0043] S11, the binocular camera 2 used to obtain machine vision captures the image of the heavy object on the tower crane, and the binocular camera 2 transmits the image of the heavy object to the controller; the controller combines the built-in binocular camera SGBM ranging algorithm to obtain the heavy object In the coordinates of the space coordinate system, the spatial positioning of the heavy objects suspended on the tower crane is completed. In this embodiment, the binocular camera 2 is a camera lens with a lens viewing angle of 45 degrees and high resolution. The SGBM ranging algorithm is a stereo matching ranging algorithm. The model of the controller is RK3399.
Embodiment 2
[0045] On the basis of Embodiment 1, the specific steps of establishing a space coordinate system in step S10 are:
[0046] The center of the base at the bottom end of the support frame 1 of the tower crane is the coordinate origin o of the space coordinate system; the projection of the original position of the boom 3 of the tower crane on the ground where the base is located is the y-axis; the y-axis rotates clockwise The radian is the x axis; the support frame 1 is the z axis.
[0047] In this embodiment, the projection of the original position of the boom 3 of the tower crane on the ground where the base is located is the positive semi-axis of the y-axis; the positive semi-axis of the y-axis rotates clockwise The arc is the positive semi-axis of the x-axis; the support frame 1 is the positive semi-axis of the z-axis.
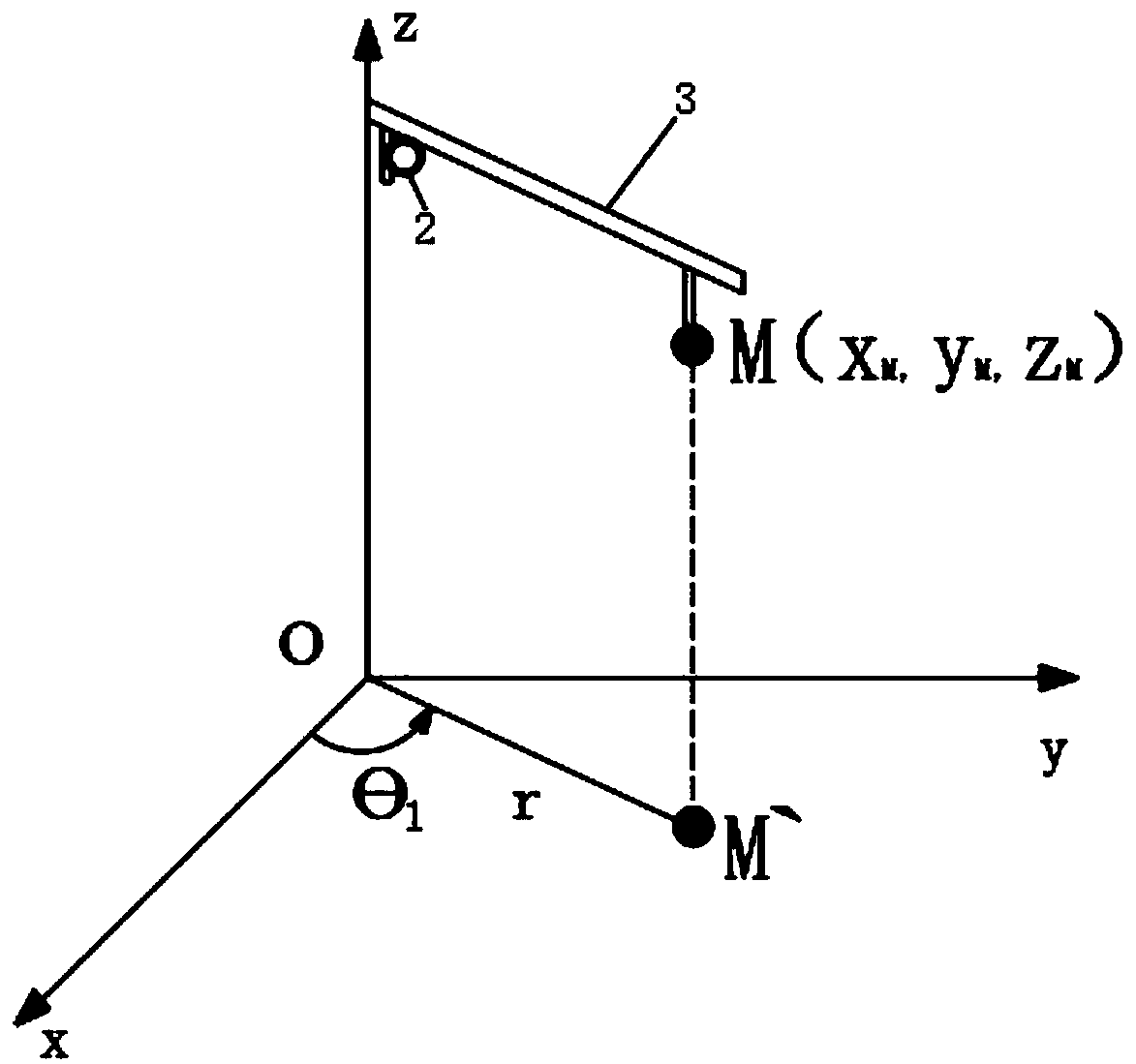
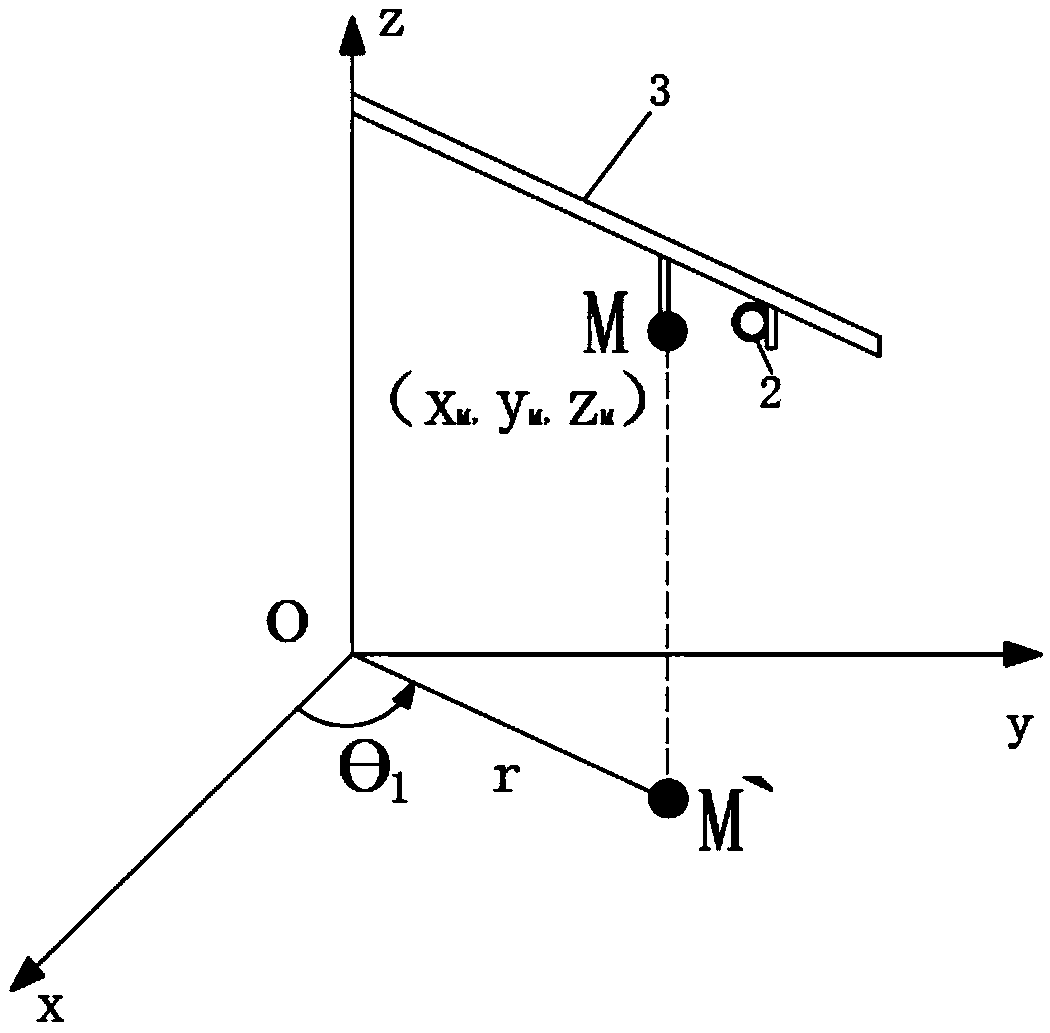
[0048] The specific steps of the position of the positioning weight in step S11 are as follows:
[0049] S111, the boom 3 rotates in the horizontal direc...
Embodiment 3
[0058] On the basis of embodiment 1 and embodiment 2.
[0059] S40, the controller sets the space coordinate system and the coordinates of the heavy object at the M position (x M ,y M ,z M ) and images of heavy objects are transmitted to the display;
[0060] S41, the operator inputs the coordinates of the target position of the heavy object;
[0061] S42, the display transmits the coordinates of the target position of the heavy object to the controller, and the controller calculates the moving path of the heavy object;
[0062] S43. Calculate the rotational angular velocity of the tower crane and the displacement velocity of the tower crane according to the moving path of the heavy object, and locate the moving range of the tower crane.
[0063] The operator obtains the position of the heavy object through the display, and can see the position of the heavy object more intuitively, which facilitates the operation of the tower crane. The controller plans the displacement p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More