

High-precision measuring method for three-dimensional shape of surface of large-sized measured part
A three-dimensional shape, high-precision technology, applied in the field of visual measurement and reverse engineering, can solve the problems of low point cloud precision, difficulty in meeting large-scale zeros, high-precision three-dimensional surface of parts, high efficiency, and all-round measurement requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The specific embodiments of the present invention will be described in detail below in conjunction with technical methods and accompanying drawings.
[0055] The laser tracker used in the test is the AT960 model of Swiss Leica Company, and the single-point measurement accuracy is ±15μm+6μm / m. The line laser scanner is LJ-7060 produced by Keyence Corporation of Japan. The X-axis accuracy is 5 μm, the Z-axis repeat measurement accuracy is 0.4 μm, the scanning object distance and depth of field are 60±8 mm, and the line laser scanning line length is 15 mm. The PI electronic control platform is M521.DD1 produced by PI Company in Germany, with an accuracy of 0.1 μm; the specification of the matte ceramic ball is 30±0.0013mm.
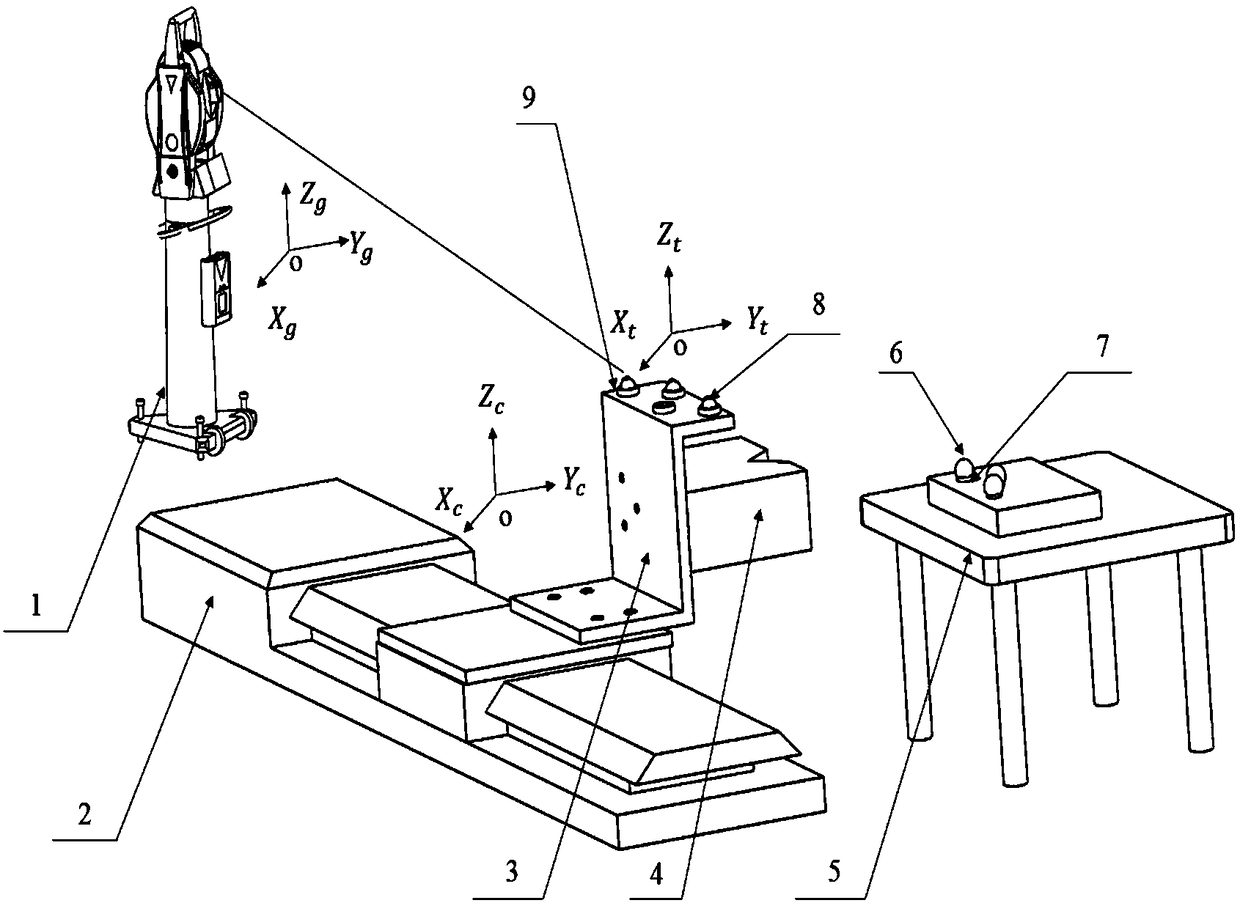
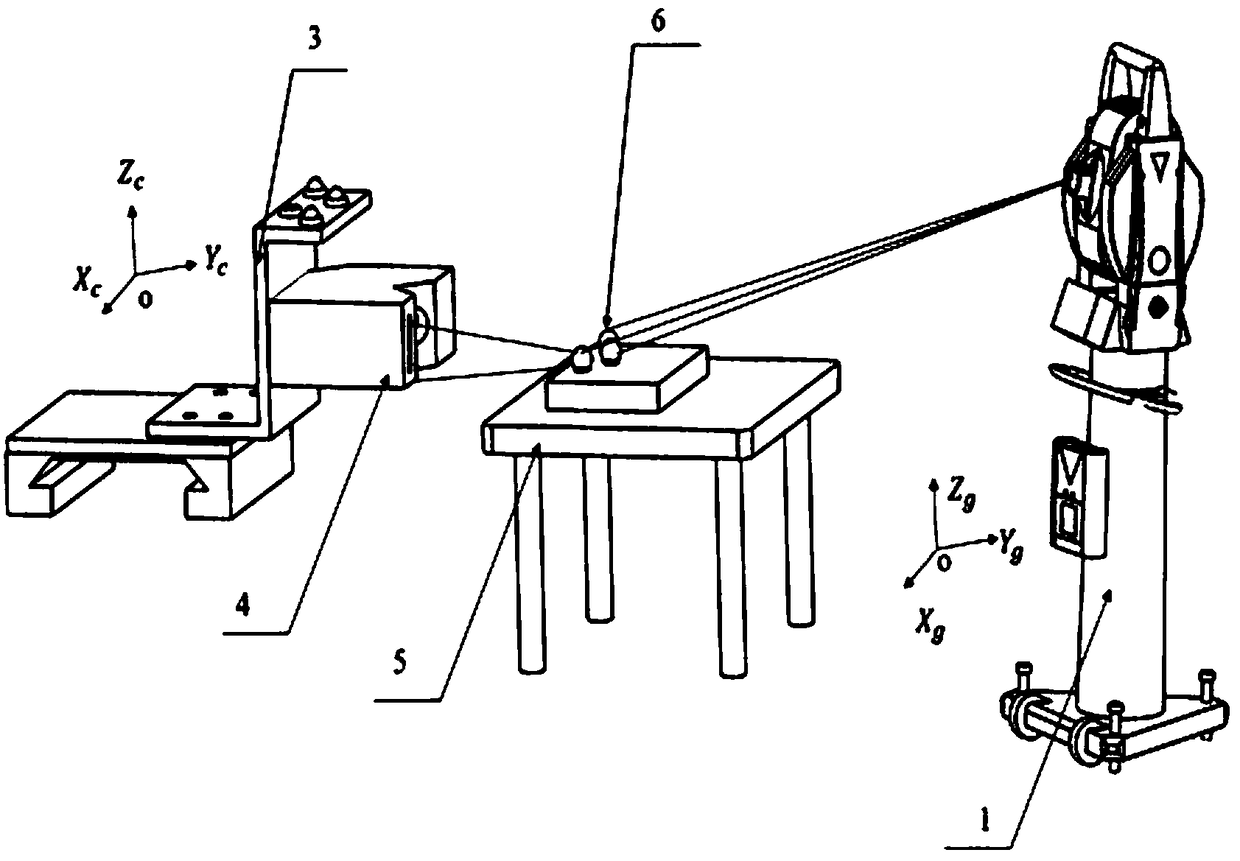
[0056] figure 1 It is a schematic diagram of the scanning measurement device for the tested part using a line laser scanner. It is composed of a line laser scanner, a PI electronic control platform, a laser tracker, a laser tracker target ball and oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More