

Method and system for changing instruction planning frequency in real time to suppress vibration
A technology for suppressing vibration and commands, applied in the general control system, control/regulation system, adaptive control, etc., can solve the problems of reducing the bandwidth of the closed-loop system, residual vibration, and reducing the rapid response ability of the system, so as to reduce the resonance amplitude and convergence time, the effect of suppressing vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
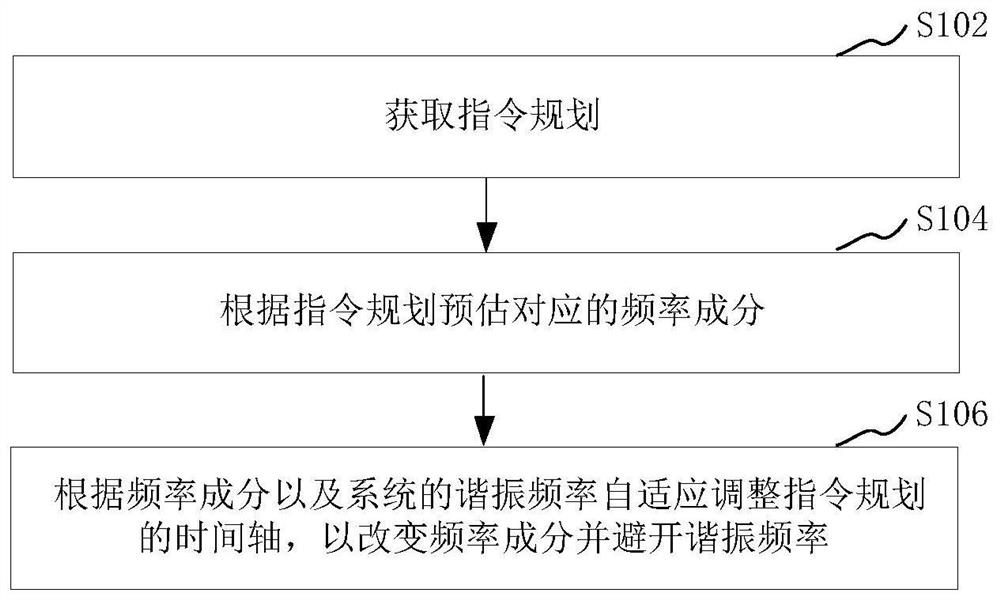
[0047] The embodiment of the present application provides a method of changing the command planning frequency in real time to suppress vibration, such as figure 1 shown, including the following steps:
[0048] Step S102, acquiring an instruction plan.
[0049] Among them, the command plan refers to the trajectory command input into the system to filter the system. Since the system is usually a closed-loop position loop, the command input to the system is generally a position command.
[0050] Step S104, estimating corresponding frequency components according to the inst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More