Operation state intelligent regulation and control system based on on-time rate analysis of AGV
A technology for operating status and control system, which is applied in control/regulation system, two-dimensional position/channel control, vehicle position/route/altitude control, etc. problems, to achieve the effect of improving intelligent monitoring and regulation, ensuring transportation effects, and improving effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
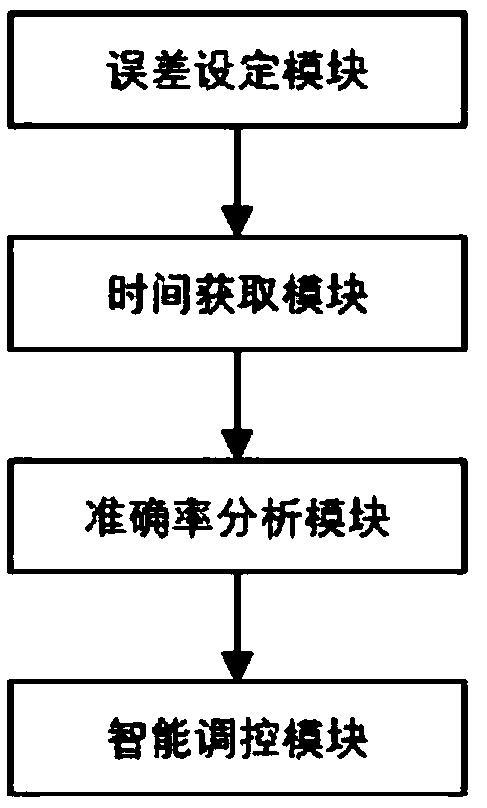
[0039] Such as figure 1 as shown, figure 1 An intelligent control system for the running state based on the punctuality analysis of the AGV trolley proposed by the present invention.
[0040] refer to figure 1 , the present invention proposes an intelligent control system based on the analysis of the punctuality rate of the AGV trolley, including:
[0041] An error setting module is used to obtain the cumulative running time and cumulative transport weight of the target AGV car within a preset time, and set a time error for the target AGV car based on the cumulative running time and cumulative transport weight;
[0042] In the present embodiment, the error setting module stores a weight-error correspondence model based on the correspondence relationship between the operation weight coefficient of the AGV trolley and the time error; by establishing the weight-error correspondence model, It can not only weaken the influence of working years and working intensity on the runnin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com