

Four-freedom-degree hybrid driving mechanism type forklift robot
A technology of hybrid drive and degree of freedom, applied in the direction of hoisting devices, etc., can solve the problems of low energy consumption, poor flexibility, low driving power, etc., and achieve the effect of low energy consumption, high load carrying capacity and low driving power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
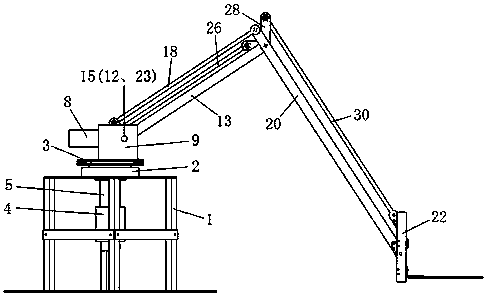
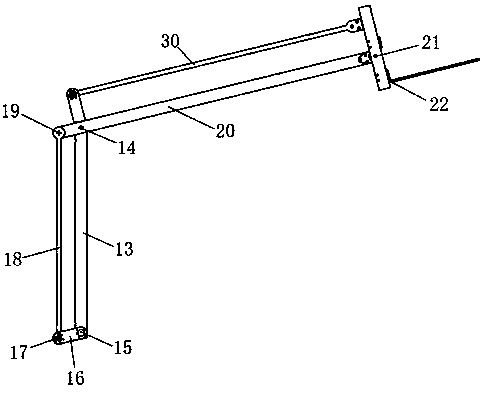
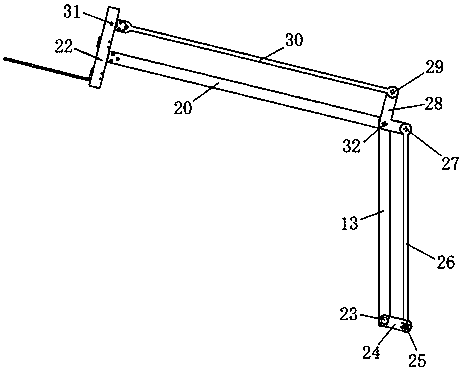
[0029] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , the four-degree-of-freedom hybrid drive mechanism type forklift robot includes a four-degree-of-freedom forklift actuator and a hybrid drive system.
[0030] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7, the four-degree-of-freedom forklift actuator includes a boom 13, a swing arm 20, a fork 22, a swing arm control branch chain, a fork control branch chain, and a rotary base, and the rotary base is composed of a base 1 and a frame 3, The frame 3 is connected to the base 1 through the first rotating pair 2, the boom 13 is connected to the frame 3 through the second rotating pair 12, and the moving arm 13 is connected to the pendulum through the third rotating pair 14. The arm 20 is connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More