

Self-assembly system of industrial robot and method
An industrial robot and assembly system technology, applied in the field of mechanical processing, can solve problems such as inability to ensure positional accuracy, inability to place parts for processing, and lack of sufficient self-awareness, and achieve the effect of reasonable structure, guaranteed safety, and high safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
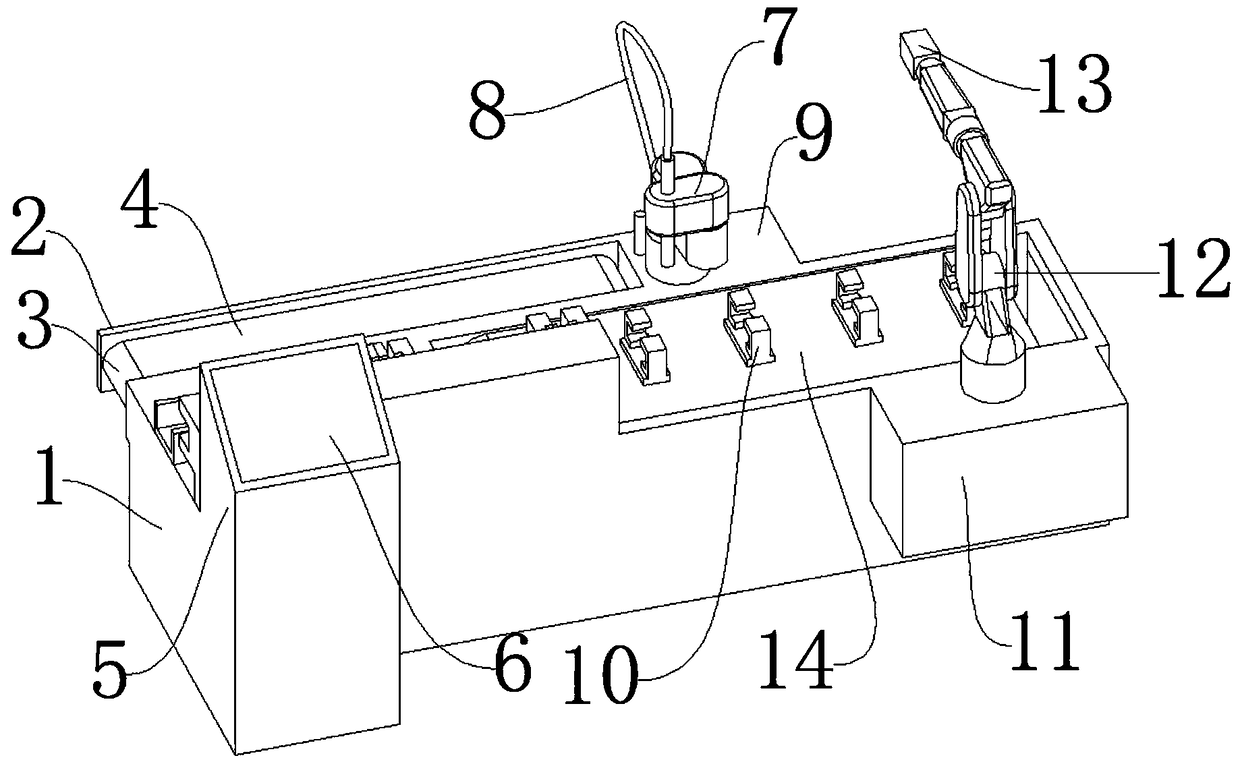
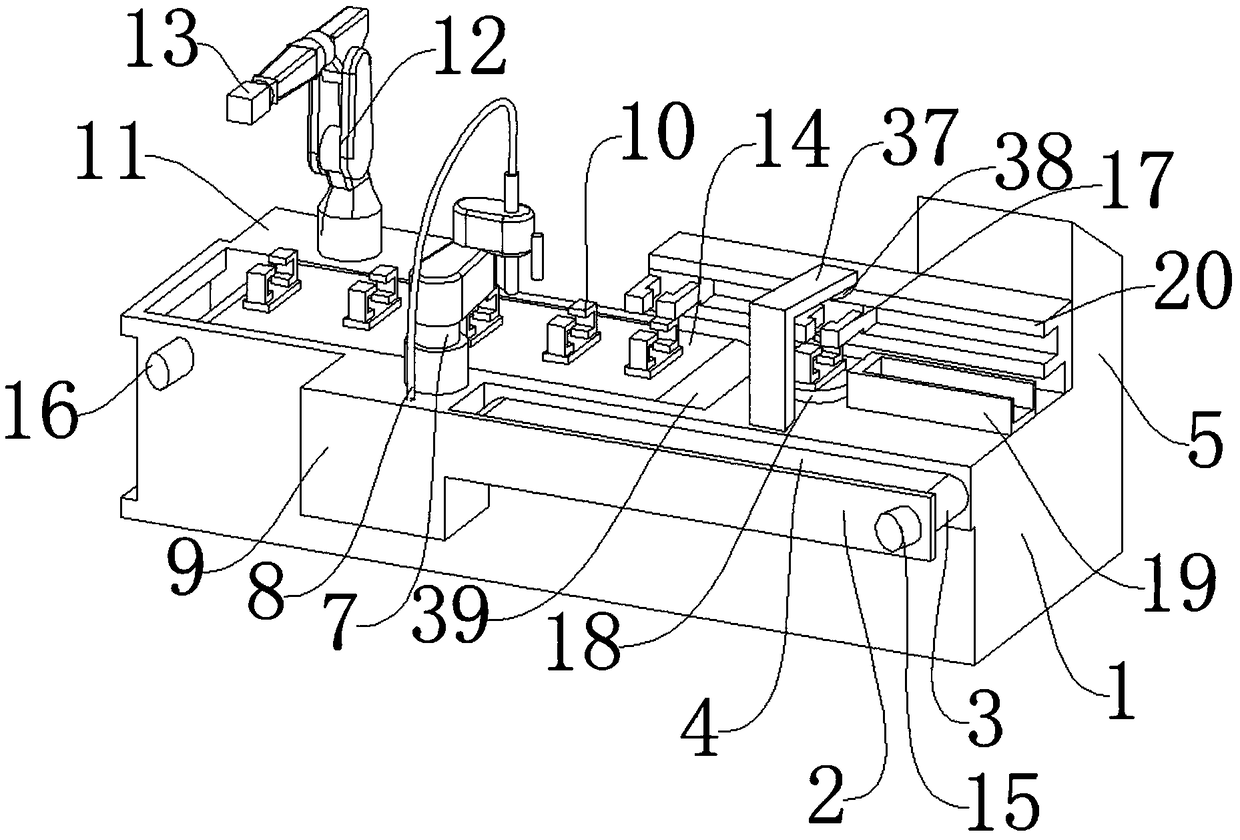
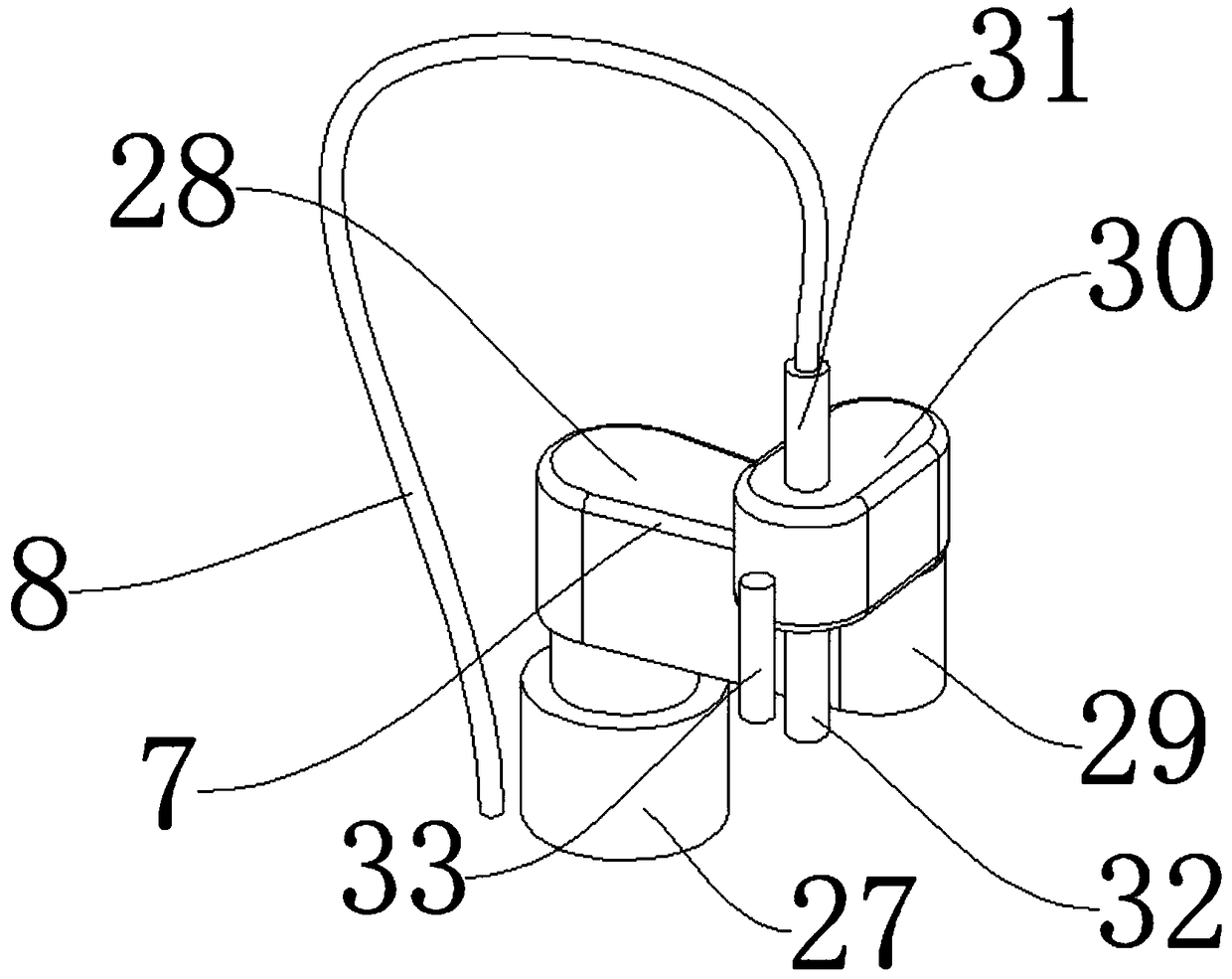
[0048] Such as Figure 1-Figure 9 As shown, an industrial robot self-assembly system includes a device housing 1, a clamping mechanism 10, a transport mechanism 17, and a first assembly mechanism 7. The front end of the device housing 1 is provided with a control cabinet 5, and the device housing 1 plays a load-bearing role. , the control cabinet 5 plays a control role, and the control cabinet 5 is connected to the device housing 1 by bolts. The upper end of the control cabinet 5 is provided with a control panel 6, which plays a control role. The upper end is provided with a storage box 19, the storage box 19 plays a storage role, the storage box 19 is connected to the device casing 1 by bolts, the rear end of the device casing 1 is provided with a first transmission casing 2, and the first transmission casing 2 plays a supporting role , the first transmission housing 2 is connected to the device housing 1 by welding, the first transmission motor 15 is arranged at the rear end...
Embodiment 2
[0050] The difference between this embodiment and embodiment 1 is:
[0051] A controller 41 is arranged inside the control cabinet 5, and the controller 41 is connected to the control cabinet 5 by screws. The controller 41 plays a role of control and processing, and the connection strength is ensured by the screw connection.
[0052] The present invention also provides a method of using an industrial robot self-assembly system, which is applied to the above-mentioned industrial robot self-assembly system. The specific method of use is as follows:
[0053] a. Put the two raw materials on the storage box 19 and the upper end of the first transmission belt 4 respectively, and use the control panel 6 to input the program into the controller 41, and the controller 41 controls the device to start;
[0054] b. The first parts are arranged through the slots on the clamping mechanism 10, the controller 41 controls the second electric slider 40 to move the transport mechanism 17 to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More