

Tunneling method and system for automatic surveying, mapping and positioning
An automatic and roadheader technology, which is applied in the direction of earth drilling, mining equipment, cutting machinery, etc., can solve the problem of intelligent and unmanned excavation, automatic measurement of underground space, accurate positioning of construction equipment, and real-time modeling of excavation space And visualization, aerospace navigation locator can not be used directly, etc., to achieve the effect of reliable design principle, wide application prospects, and accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] In order to enable those skilled in the art to better understand the technical solutions in the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
[0063] Key terms appearing in this application are explained below.
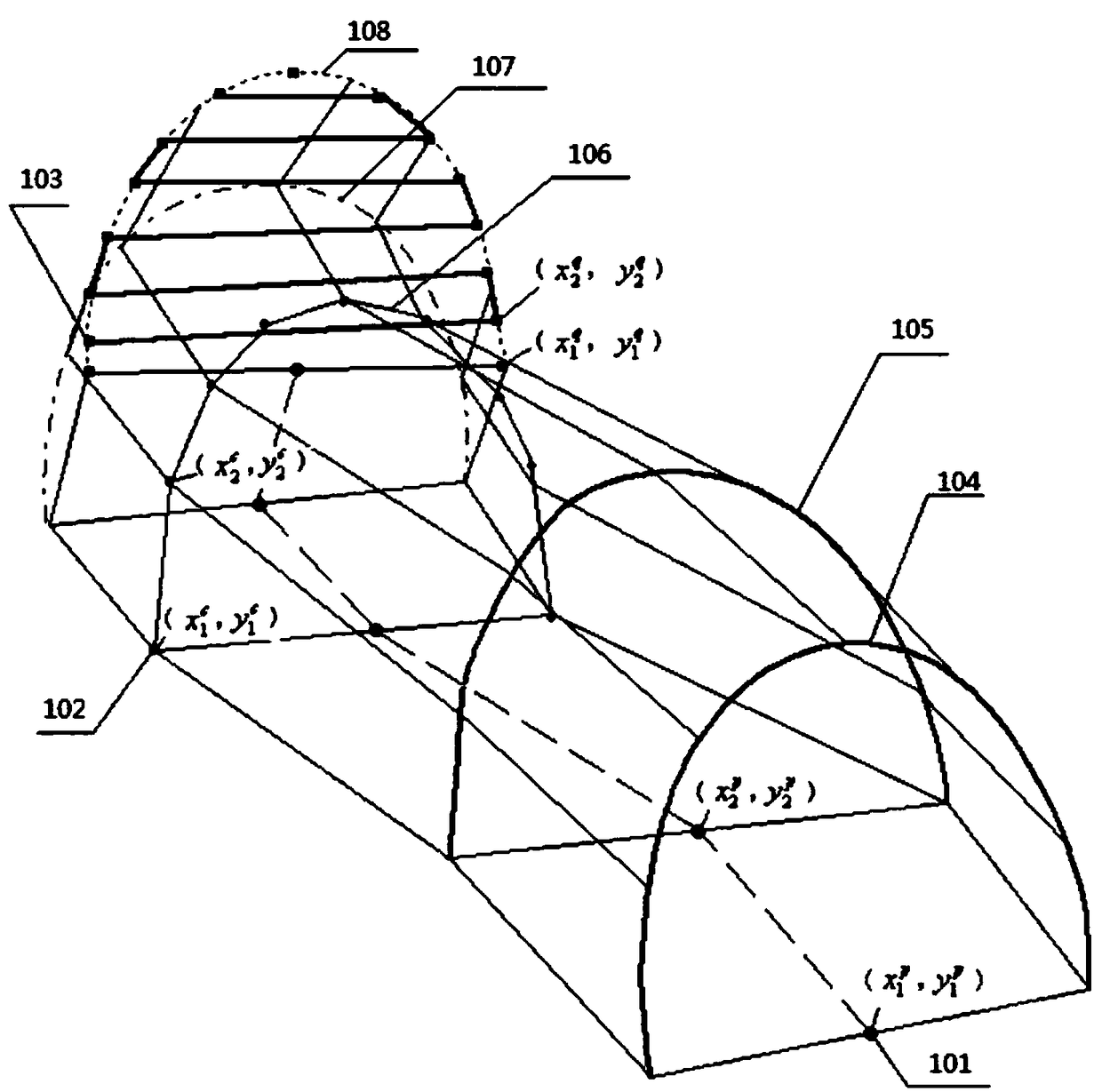
[0064] Such as figure 1 As shown, the excavation method 100 for automatic surveying and positioning provided by the present application includes:
[0065] Step 110, discretizing the shaft model given by the design system into a polyline of the central axis of the bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More