

Underwater robot path tracking control method based on model predictive control
A model predictive control and underwater robot technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as time-consuming, complex calculation, and inability to meet the requirements of control performance and calculation efficiency at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The present invention proposes a path tracking control method for an underwater robot based on model predictive control, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0087] The present invention proposes a path tracking control method for an underwater robot based on model predictive control, which is divided into three links: building a predictive model, model feedback correction, and online optimization solution; the method includes the following steps:
[0088] 1) Build a prediction model; the specific steps are as follows:
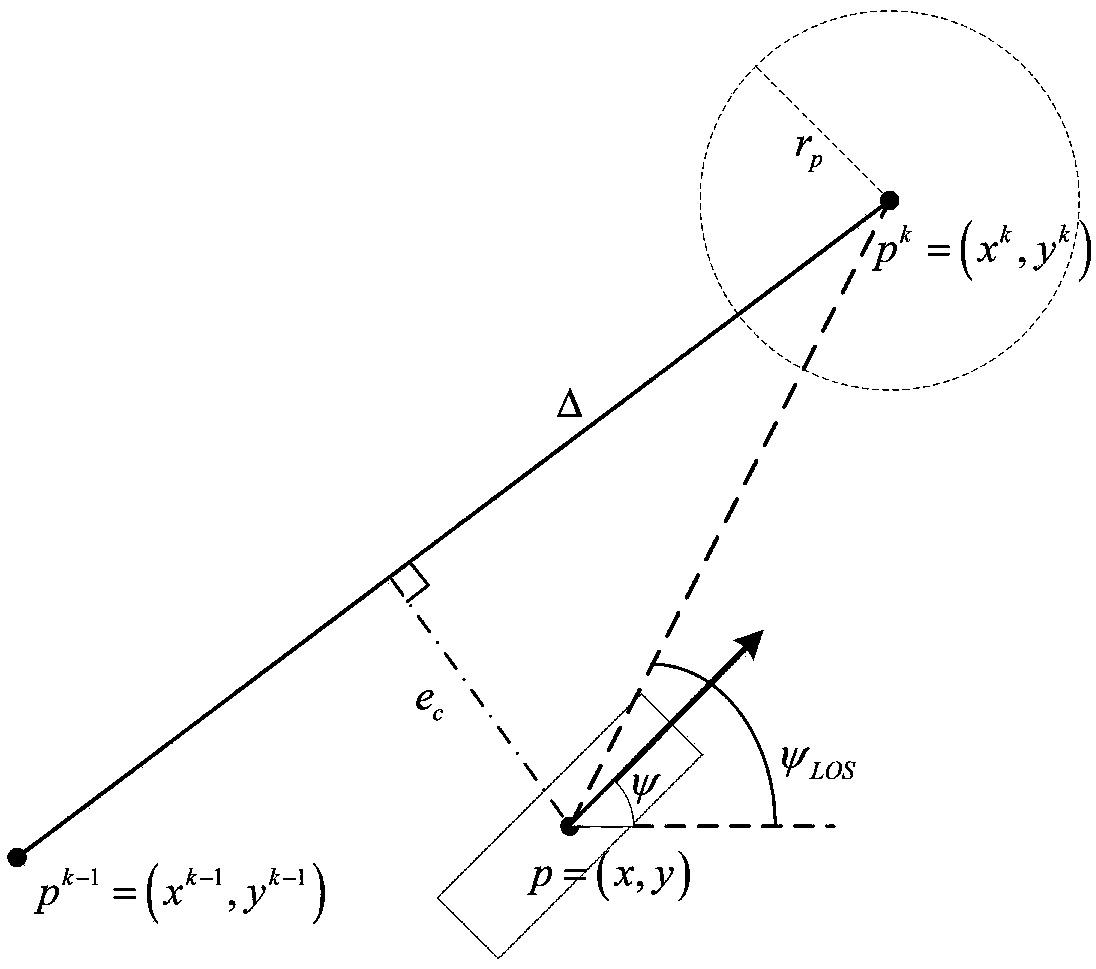
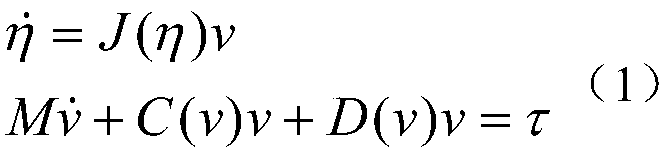
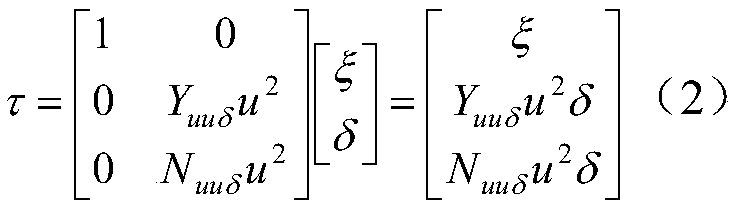
[0089]1-1) Establish the kinematics and dynamics model of the underwater robot;
[0090] To implement this method, it is first necessary to determine the specific form of the kinematics and dynamics model of the controlled underwater robot. The kinematics and dynamics model of an underwater robot is a nonlinear differential equation system coupled with multiple variabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More