

Improved point cloud splicing method of icp object to be tested by fusing fast point feature histogram
A point feature histogram and point cloud splicing technology, applied in the field of point cloud processing, can solve the problems of low splicing efficiency, low splicing accuracy, and insufficient stability, so as to avoid falling into local optimum, improve the difficulty of falling into local optimum, The effect of improving the stability of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below with reference to the accompanying drawings and embodiments.
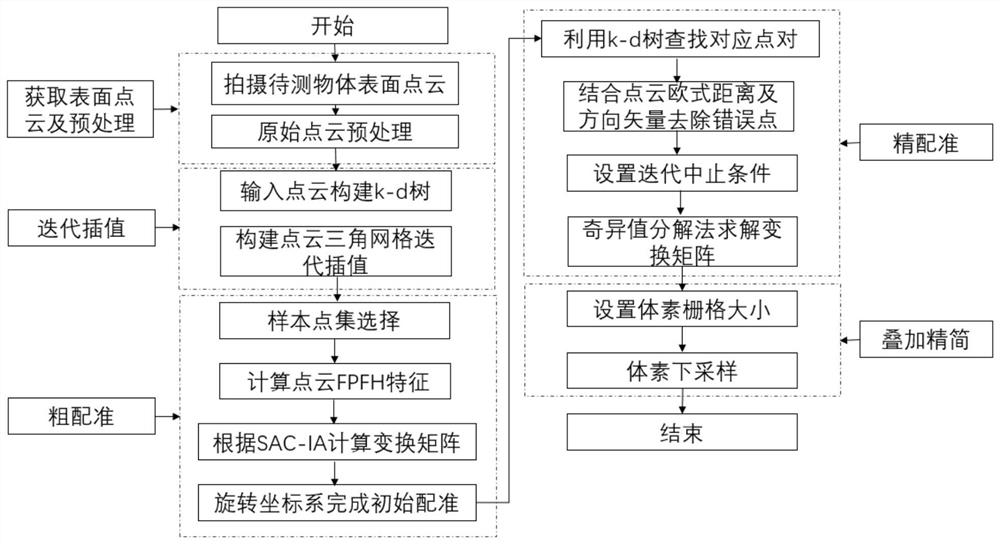
[0062] like figure 2 As shown, the embodiment according to the method of the present invention and its implementation process include the following steps:
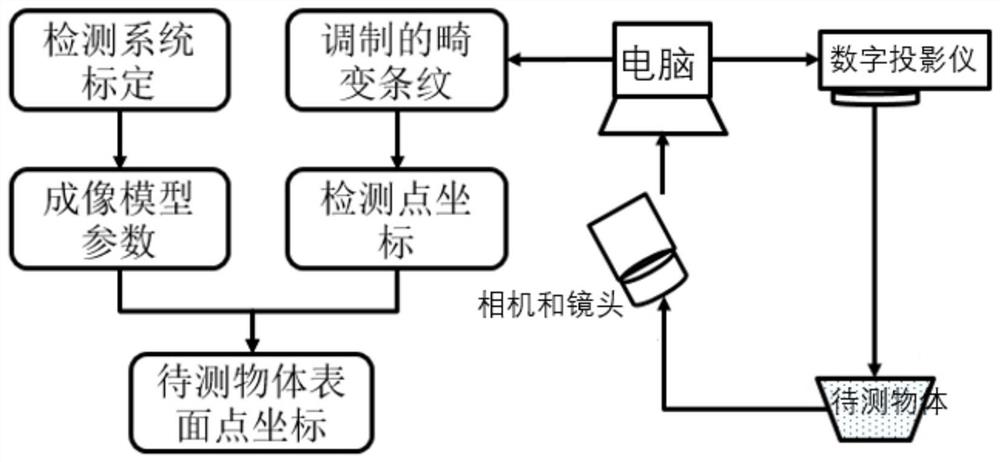
[0063] The specific implementation adopts a structured light detection system, such as figure 1 As shown, the structured light detection system includes a projector, a computer, a CCD camera and a platform. The object to be measured is placed on the platform, the projector is connected to the computer, the projector and the camera are placed on both sides of the object to be measured, and the lens of the projector The lens of the camera and the CCD camera are all facing the object to be measured; the object to be measured is placed on the desktop, the computer sends out a signal of the input grating pattern, which is input to the projector to generate a fringe grating as a grating light source to il...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More