

Robot remote real-time monitoring system based on cloud computing
A real-time monitoring system and robot technology, applied in the circuit field, can solve problems affecting signal analysis and processing, error control instructions, signal abnormalities, etc., and achieve the effect of automatic calibration, signal stabilization, and elimination of signal self-excitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
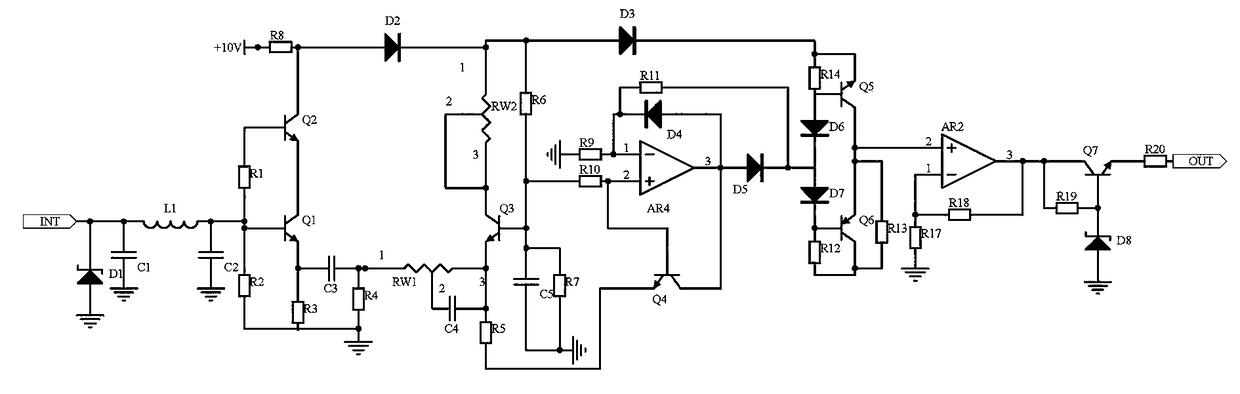
[0012] Embodiment 1, a remote real-time monitoring system for a robot based on cloud computing includes a signal receiving circuit, an enhanced push-pull circuit and an operational amplifier output circuit, and the signal receiving circuit receives a signal transmission channel input from a robot remote control terminal based on cloud computing. The data signal at the end is filtered by a π-type filter circuit composed of inductor L1, capacitor C1, and capacitor C2, and then input into the enhanced push-pull circuit. The enhanced push-pull circuit uses transistor Q1, transistor Q2, transistor Q3, and variable resistor RW1. Resistor RW2 forms a signal enhancement circuit to adjust the signal frequency. At the same time, a rectification circuit composed of operational amplifier AR4, diode D4 and resistor R11 is designed to rectify the signal, and a push-pull circuit composed of triode Q5, triode Q6, diode D6 and diode D7 is used to eliminate the signal. Self-excitation, wherein t...
Embodiment 2
[0014] Embodiment 2, on the basis of Embodiment 1, the operational amplifier output circuit uses the operational amplifier AR2 to amplify the signal in phase, and simultaneously uses the triode Q7 and the regulator tube D8 to form a triode voltage regulator circuit to output after voltage stabilization, further stabilizing the signal , that is to input into the signal transmission channel for receiving signals from the robot remote control terminal based on cloud computing, the inverting input terminal of the operational amplifier AR2 is connected to resistor R17 and one end of resistor R18, the other end of resistor R17 is grounded, and the other end of resistor R18 One end is connected to the output terminal of the operational amplifier AR2, the collector of the transistor Q7 and one end of the resistor R19, the base of the transistor Q7 is connected to the other end of the resistor R19 and the negative pole of the voltage regulator tube D8, the positive pole of the voltage re...
Embodiment 3
[0015] Embodiment 3, on the basis of Embodiment 1, the signal receiving circuit receives the data signal at the input end of the signal transmission channel of the robot remote control terminal based on cloud computing, and uses the inductor L1, capacitor C1, and capacitor C2 to form a π-type filter After the circuit is filtered, it is input into the enhanced push-pull circuit to improve the anti-interference performance of the signal. One end of the inductor L1 is connected to the signal input port, the negative pole of the voltage regulator tube D1 and one end of the capacitor C1, the positive pole of the voltage regulator tube D1 is grounded, and the other end of the capacitor C1 One end of the inductor L1 is connected to one end of the capacitor C2 and the base of the transistor Q1, and the other end of the capacitor C2 is connected to the ground.
[0016]When the present invention is specifically used, the robot remote real-time monitoring system based on cloud computing i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More