

Electroencephalographic and electromyographic information automatic intention recognition and upper limb intelligent control method and system
A technology of intelligent control and intention, applied in sports accessories, passive exercise equipment, medical science, etc., can solve problems affecting system performance, etc., and achieve the effect of strong generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
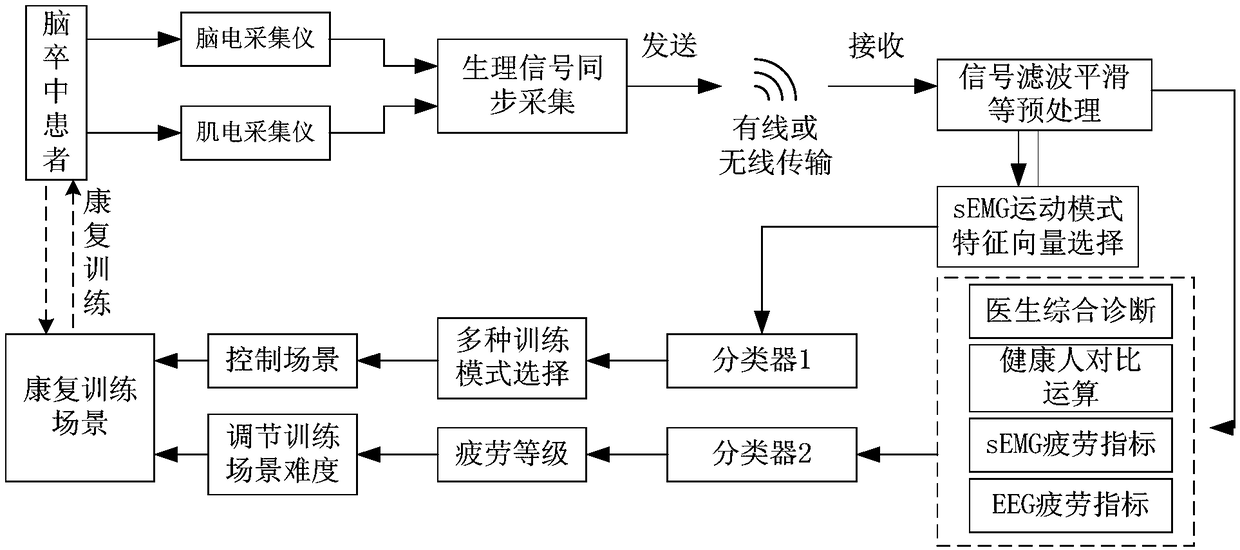
[0052] The present invention correspondingly provides a method and system for automatic intention recognition of brain muscle information and upper limb intelligent control of a stroke rehabilitation robot based on a mixed kernel function support vector machine. Such as Figure 6 As shown, the system includes: EEG signal acquisition instrument, human-computer interaction force sensor, photoelectric angle encoder (angular velocity and angle), operational amplifier filter, data acquisition card, host computer, motion control card, servo drive . The data acquisition card collects the patient's EEG signal, surface EMG signal, interaction force, joint angle and angular velocity, etc. through the EEG signal acquisition instrument, human-computer interaction force sensor and photoelectric angle encoder, and performs filtering and amplification. ; As a comprehensive control and monitoring processing platform, the upper computer first extracts and analyzes the features of the collecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More