

Rotorcraft double-mechanical-arm target positioning and grabbing system and method
A dual robotic arm, target positioning technology, applied in the field of unmanned aerial vehicles, can solve the problems of difficult to stabilize the center of gravity, cumbersome line connection operation, single identification object, etc., to achieve the effect of improving overall reliability, wide application prospects, flexible and accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0067] In the prior art, the rotor-flying manipulators are all single-arm systems, which are difficult to stabilize the center of gravity, and the grasped objects are easily limited; most rotor-flying manipulator systems are not equipped with multi-vision sensors, cannot communicate with the environment in real time, and are mostly controlled manually. Grasping, the recognition and grasping system based on vision and robotic arm planning has not been formed.
[0068] The application of the present invention will be further described below in conjunction with specific analysis.
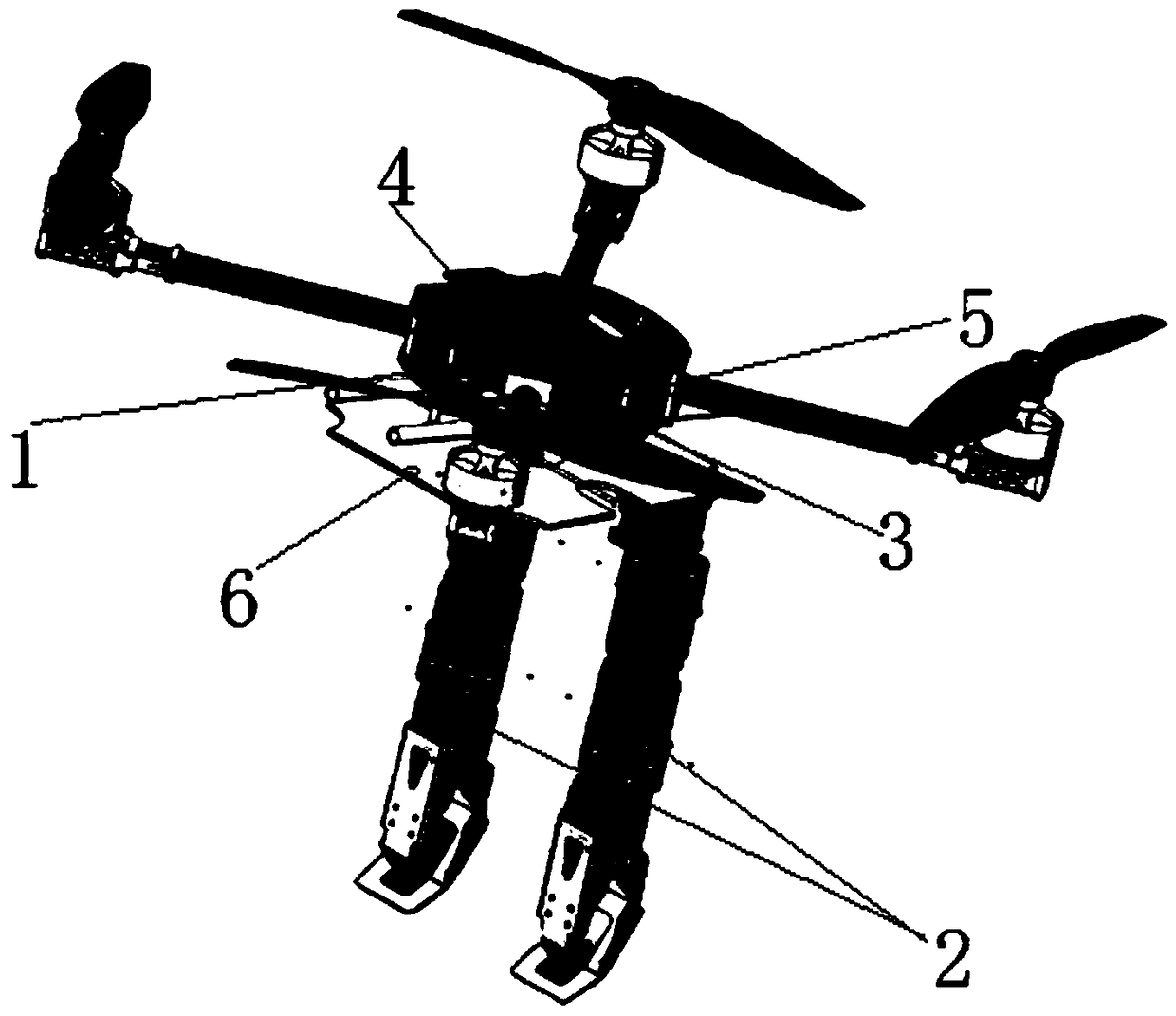
[0069] like figure 1 As shown in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More