

RBF neural network adaptive dynamic surface control method based on flexible joint of robot arm
A technology of dynamic surface control and neural network, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as no solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
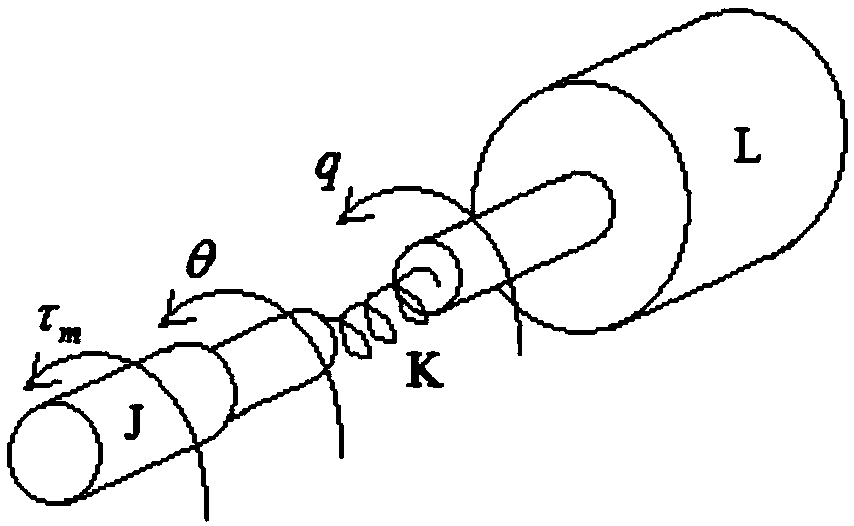
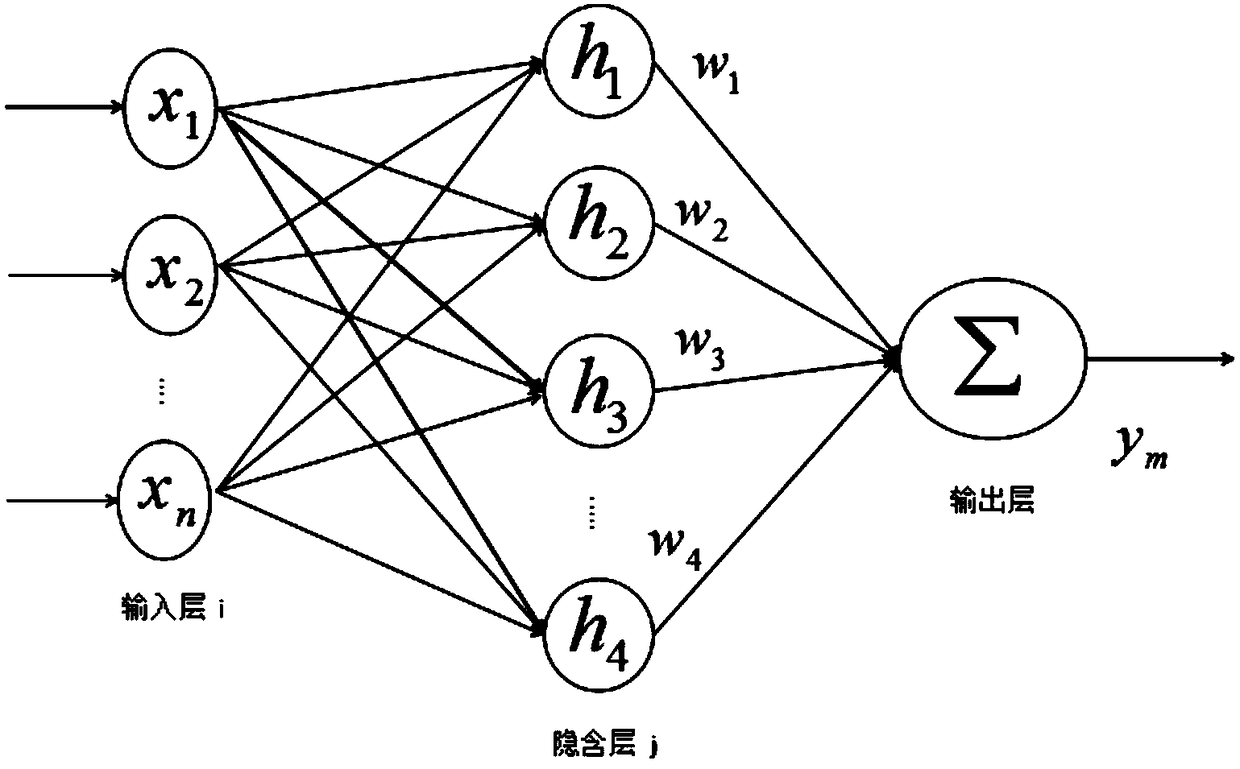
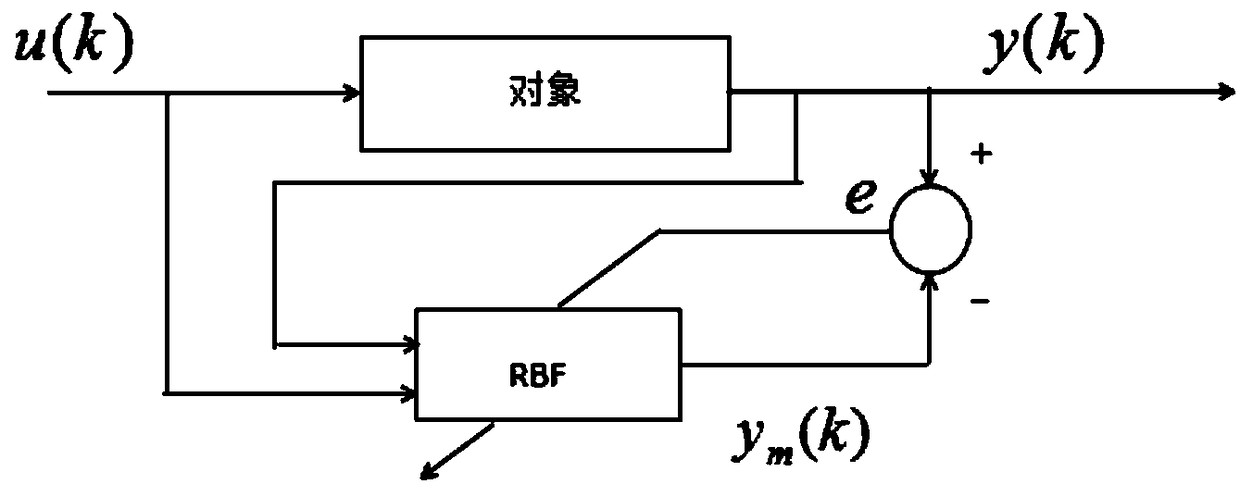
[0055] Aiming at the mechanical arm with flexible joints, the present invention proposes an adaptive RBF neural network dynamic surface control method based on Lyapunov stability analysis, which fully utilizes the approximation ability of the RBF neural network to compensate for the problems caused by inaccurate modeling , eliminate the need for an accurate dynamic model, use dynamic surface technology to solve the calculation expansion problem caused by backstepping used in traditional adaptive control, and consider the limited torque output of the manipulator and external uncertain interference, and propose a suitable controller; The virtual controller virtually disassembles a complex manipulator system into multiple subsystems, decomposes the modeling, controller design, and stability analysis of the complex system into each subsystem, and finally separates each subsystem through "virtual power flow". are dynamically connected. Concrete method of the present invention is as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More