

Segmentation-based super-low altitude flight control method for pilotless aircraft
A low-altitude flight, control method technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as large step response, high fuel consumption, and increased cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
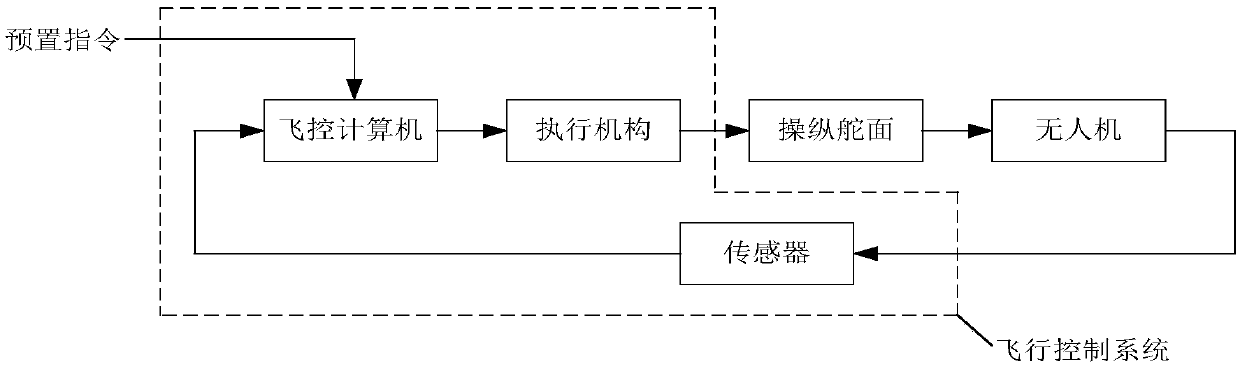
[0066] UAV ultra-low-altitude flight control working principle: the working principle of the ultra-low-altitude flight control system in the specific embodiment of the present invention is as follows figure 1 As shown, the system needs sensors (gyro platform, angular rate gyro, radio altimeter) to measure the flight state of the UAV (pitch angle, roll angle, pitch angle rate, relative flight altitude), and then the flight control computer according to the preset instructions Perform comparison calculations, and output control signals to the actuator (elevator steering gear) to drive the steering surface (elevator rudder surface), thereby generating aerodynamic force / mome...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More