

Driven end device of interventional operation robot and control method thereof
An interventional surgery and robotic technology, applied in the field of minimally invasive vascular interventional surgery, can solve the problem of bacterial transmission to the upper catheter holder, guide wire holder, sanitary film catheter holder and guide wire holder. It can achieve the effect of compact structure, easy disassembly and assembly, and reasonable structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
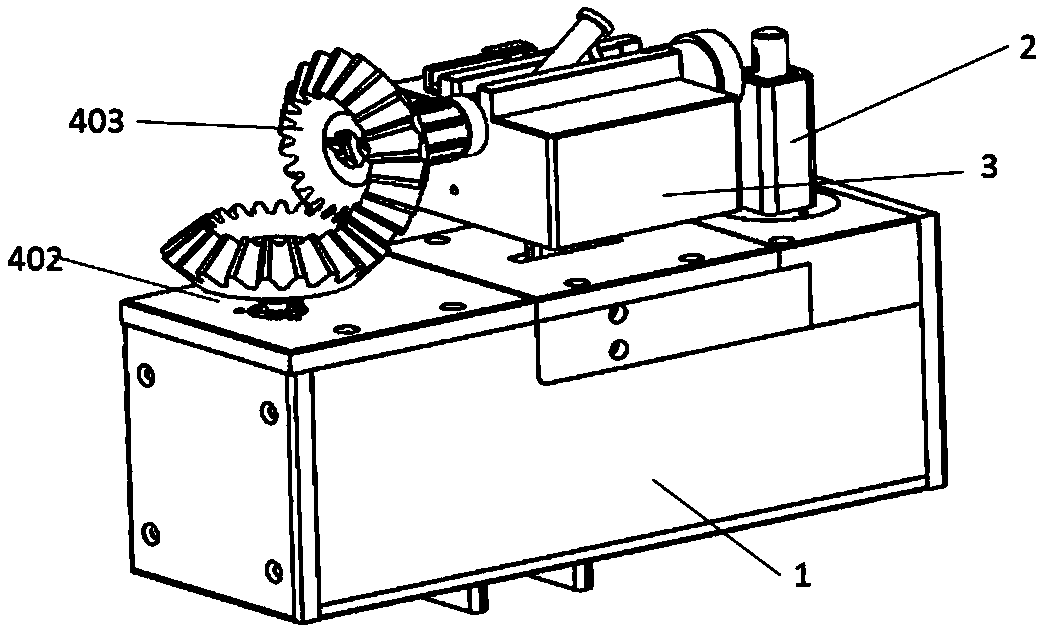
[0056] A slave device for an interventional surgery robot, which mainly includes four parts, namely a main part 1, a guide wire clamp 2, a catheter clamp 3, and a torsion assembly 4; wherein, the main part 1 is the component of the other four parts. Installation basis, catheter holder 3 and guide wire holder 2 are detachably mounted on the main body part 1 through the guide wire holder connection shaft and the catheter holder connection shaft, wherein the catheter holder ( 3) and the guide wire clamp (2) are respectively detachably installed on the upper cover of the main body part (1). The guidewire clamp 2 is used to clamp or loosen the guidewire, the catheter holder 3 is used to clamp the catheter, and the twisting assembly 4 is used to complete the twisting operation on the catheter. Through the mutual cooperation of various parts, the device can complete the clamping, pushing and twisting of the catheter, as well as the clamping or loosening of the guide wire, so as to re...
Embodiment 2
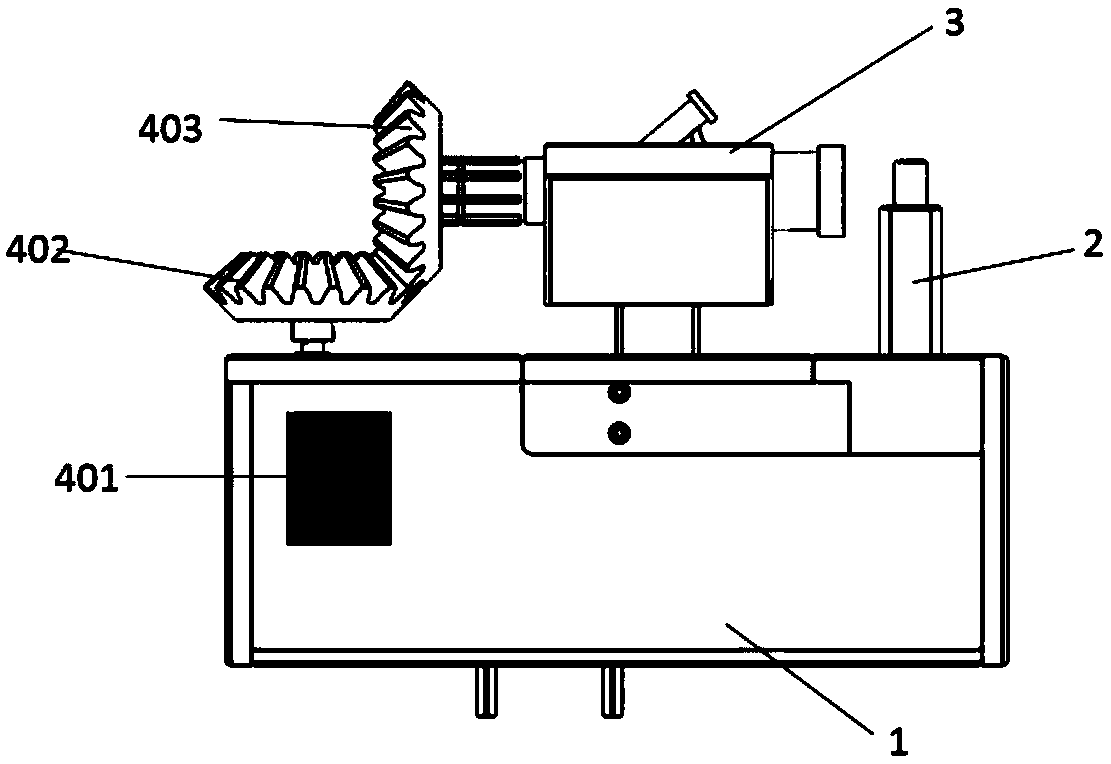
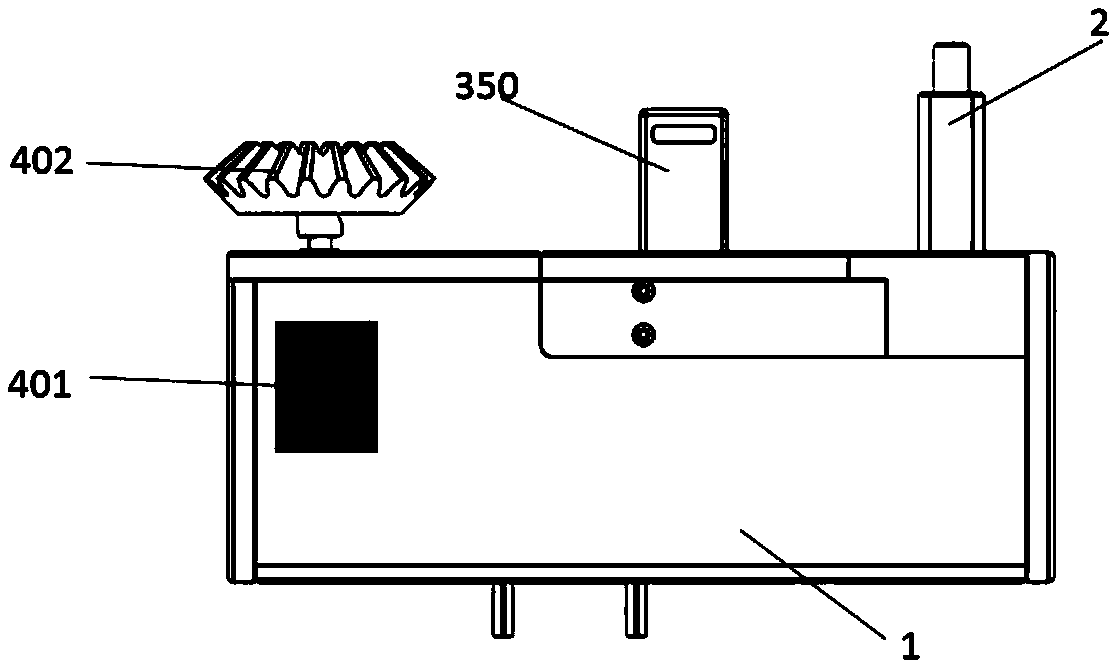
[0058] A slave device for an interventional surgery robot, which mainly includes four parts, namely a main part 1, a guide wire clamp 2, a catheter clamp 3, and a torsion assembly 4; wherein, the main part 1 is the component of the other four parts. Installation basis, catheter holder 3 and wire holder 2 are detachably installed on the main body part 1 through the connection shaft of the guide wire holder and the connection shaft of the catheter holder, wherein the torsion assembly (4) includes: pinion (402), bull gear (403) and motor (401), wherein pinion (402) links to each other with bull gear (403) and carries out power transmission, and pinion (402) forms a bevel gear set with bull gear (403). The guidewire clamp 2 is used to clamp or loosen the guidewire, the catheter holder 3 is used to clamp the catheter, and the twisting assembly 4 is used to complete the twisting operation on the catheter. Through the mutual cooperation of various parts, the device can complete the c...
Embodiment 3
[0060] A slave device for an interventional surgery robot, which mainly includes four parts, namely a main part 1, a guide wire clamp 2, a catheter clamp 3, and a torsion assembly 4; wherein, the main part 1 is the component of the other four parts. Installation basis, catheter holder 3 and guide wire holder 2 are detachably mounted on the main body part 1 through the guide wire holder connection shaft and the catheter holder connection shaft, wherein the catheter holder ( 3) and the guide wire clamp (2) can be detachably installed on the upper cover of the main part (1); wherein the torsion assembly (4) includes: a small gear (402), a large gear (403) and a motor (401 ), wherein the pinion (402) is connected with the bull gear (403) for power transmission, and the pinion (402) forms a bevel gear set with the bull gear (403). The pinion transmission shaft passes through the upper part of the main body part (1), and the bull gear (403) is arranged in a vertical direction, and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More