

Navigation puncture system and control method
A technology of puncture needles and control equipment, which is applied in the field of surgical navigation, can solve problems such as patient injuries, and achieve the effects of reducing injuries, light weight, and improving accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
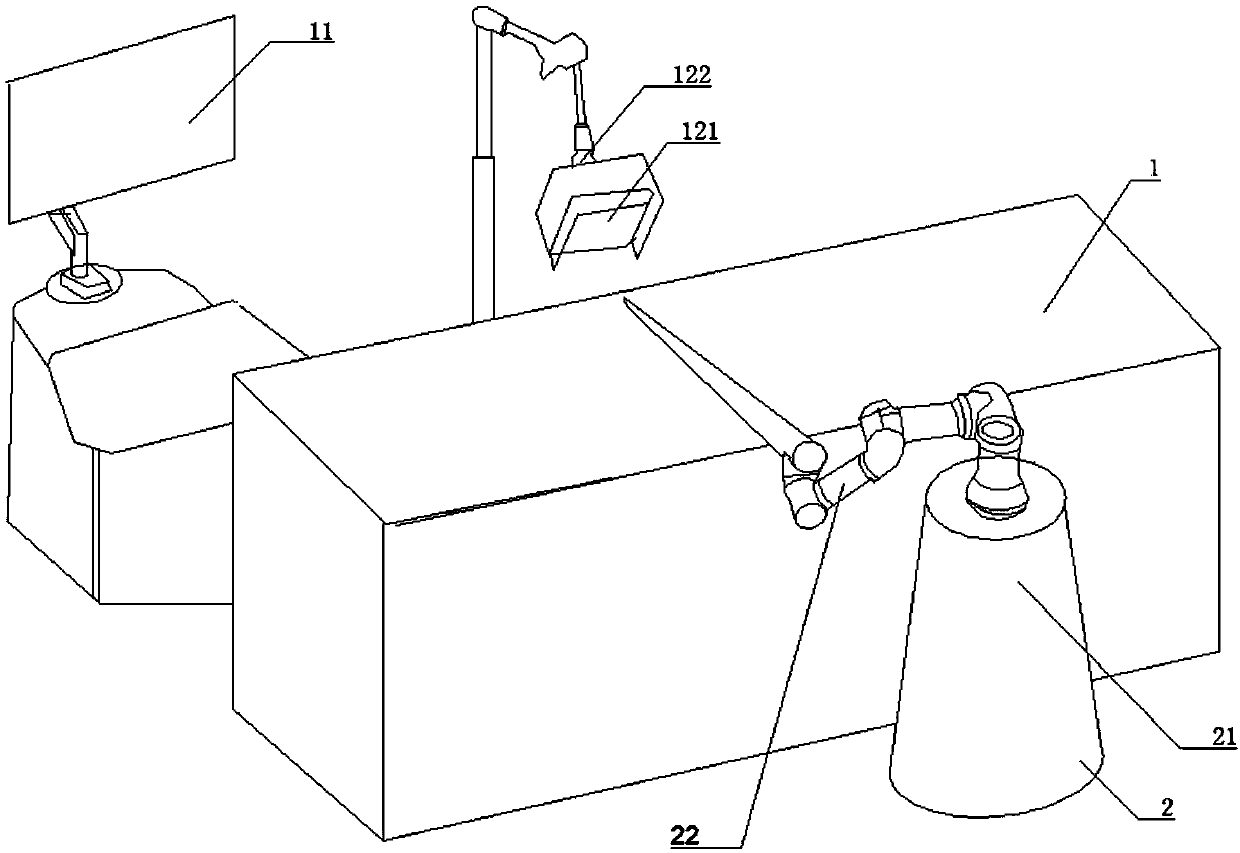
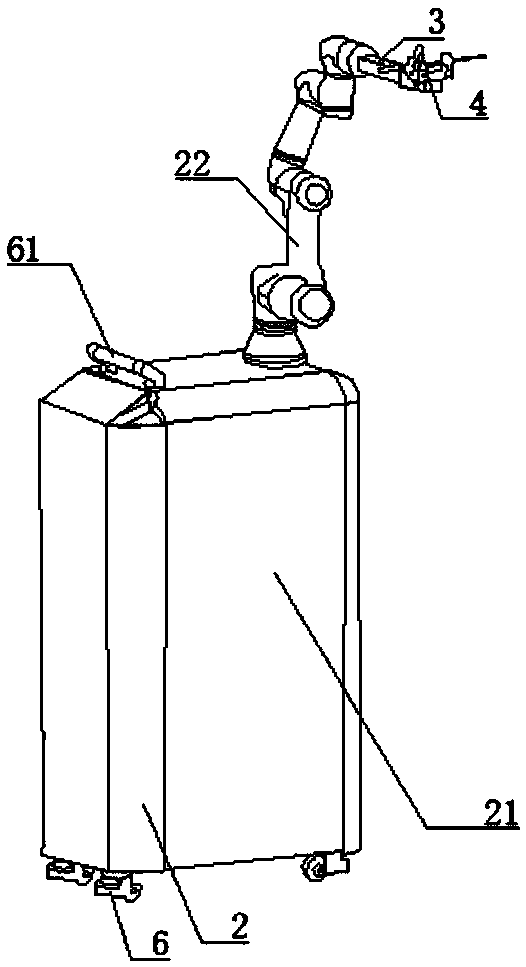
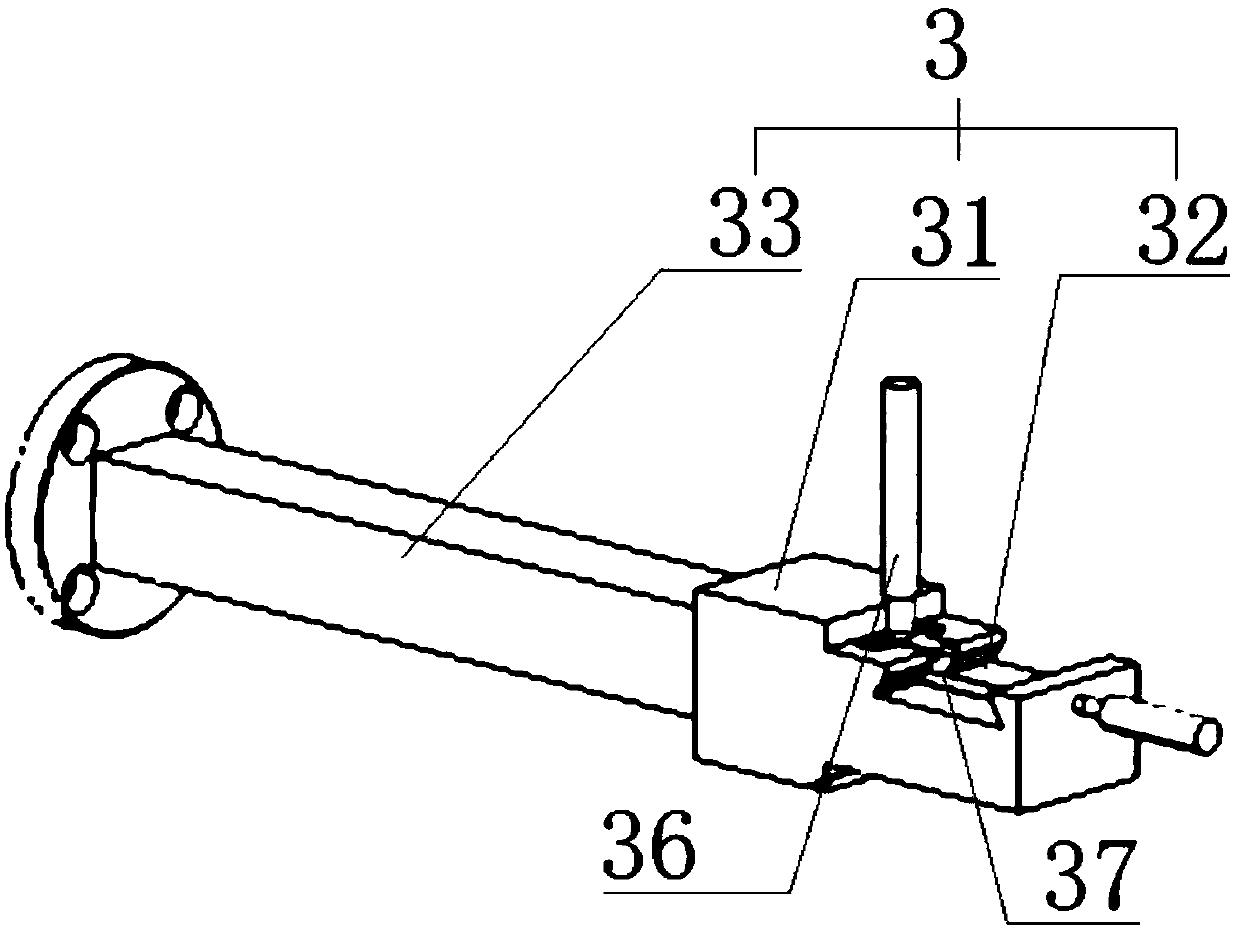
[0034] Embodiment 1; A kind of navigation puncture system, such as figure 1 and figure 2 As shown, it includes a workbench 1, a host 11, and a control device and a space positioning device controlled by the host 11; the control device includes a base 2, a control module 21 arranged in the base, a mechanical arm 22 fixed on the base 2, a set The puncture guide module 3 on the end of the manipulator 22 away from the base 2 and the puncture movement module 4 on the end of the puncture guide module 3 away from the manipulator 22; the manipulator 22 is controlled by the control module 21; the space positioning device includes a magnetic field generator 121. The magnetic field receiver 122, the positioning sheet and the positioning probe arranged on the positioning sheet; the spatial positioning device is arranged on the side of the workbench 1 away from the control equipment.
[0035] In the above embodiment, if figure 1 As shown, the workbench 1 is used for the object, that is,...
Embodiment 2
[0048] Embodiment 2: The present invention also provides a navigation puncture control method, which is applied to any one of the above-mentioned navigation puncture systems, including the following steps:
[0049] S1: loading the image scanned by the patient into the host computer 11;
[0050] S2: Paste the positioning sheet on the object on the workbench 1 to obtain an image space, obtain the physical space through the positioning probe, and realize the fusion of the physical space and the image space through automatic recognition by an algorithm;
[0051] S3: the control module 21 fuses and calibrates the coordinates of the robotic arm 22 and the coordinates of the sensor 7 to obtain a robotic arm space;
[0052] S4: Merge the space of the robot arm with the space of the physical space above through an algorithm;
[0053] S5: Presetting the motion trajectory of the robotic arm 22 in the host and calibrating the robotic arm space, physical space and image space;
[0054] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More