

Active-passive variable stiffness joint and stiffness adjustment method thereof
A technology of variable stiffness and joints, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of insufficient power, small relative rotation angle, complex structure, etc., and achieve the effect of large stiffness adjustment range, reduced power demand, and simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
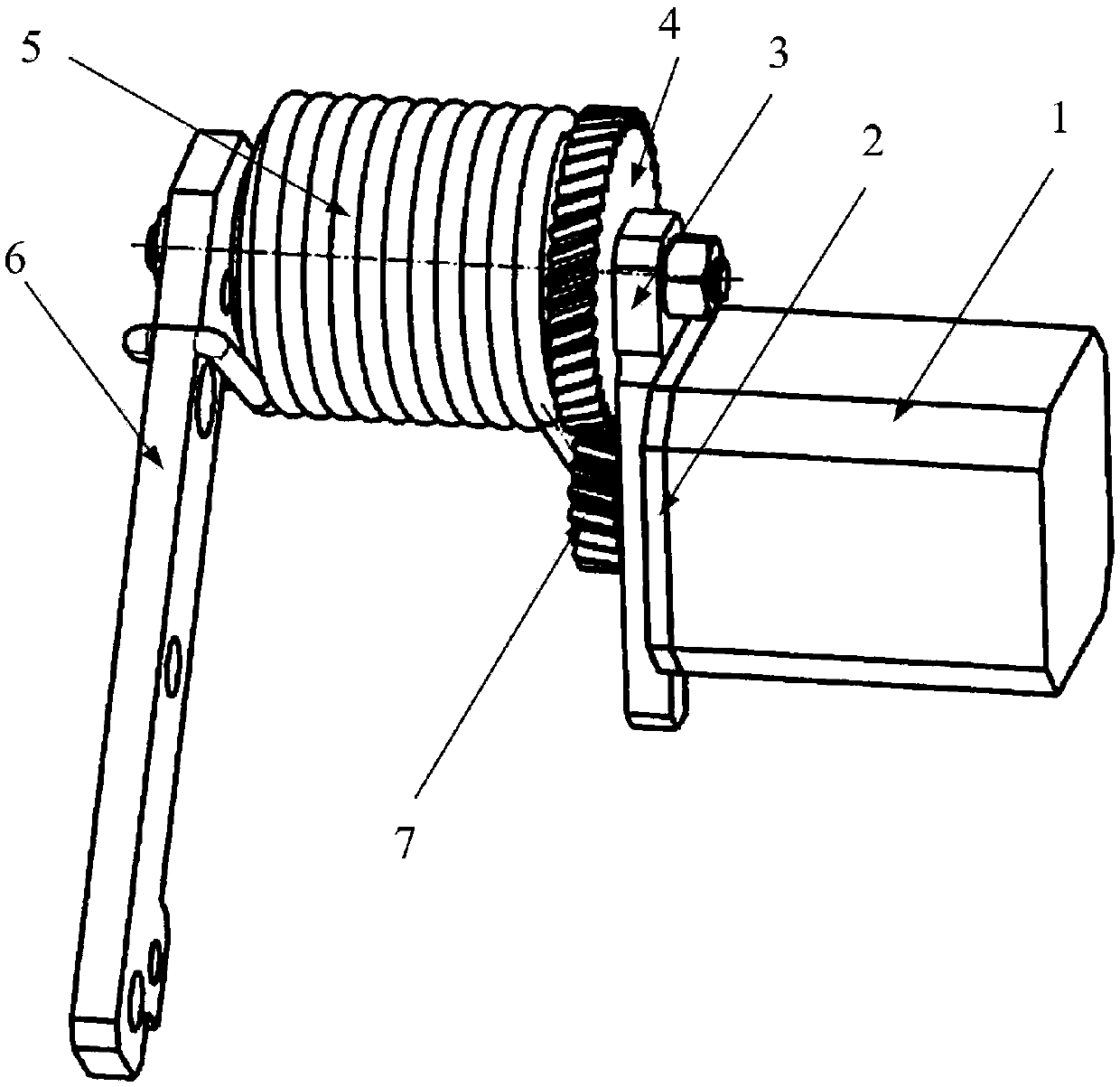
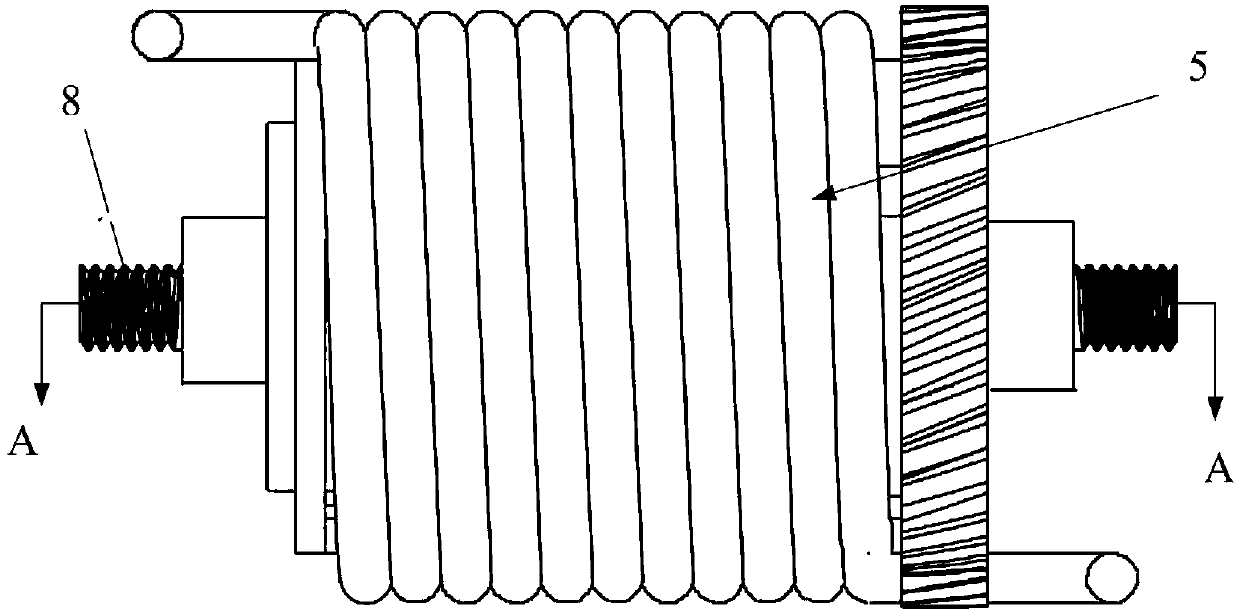
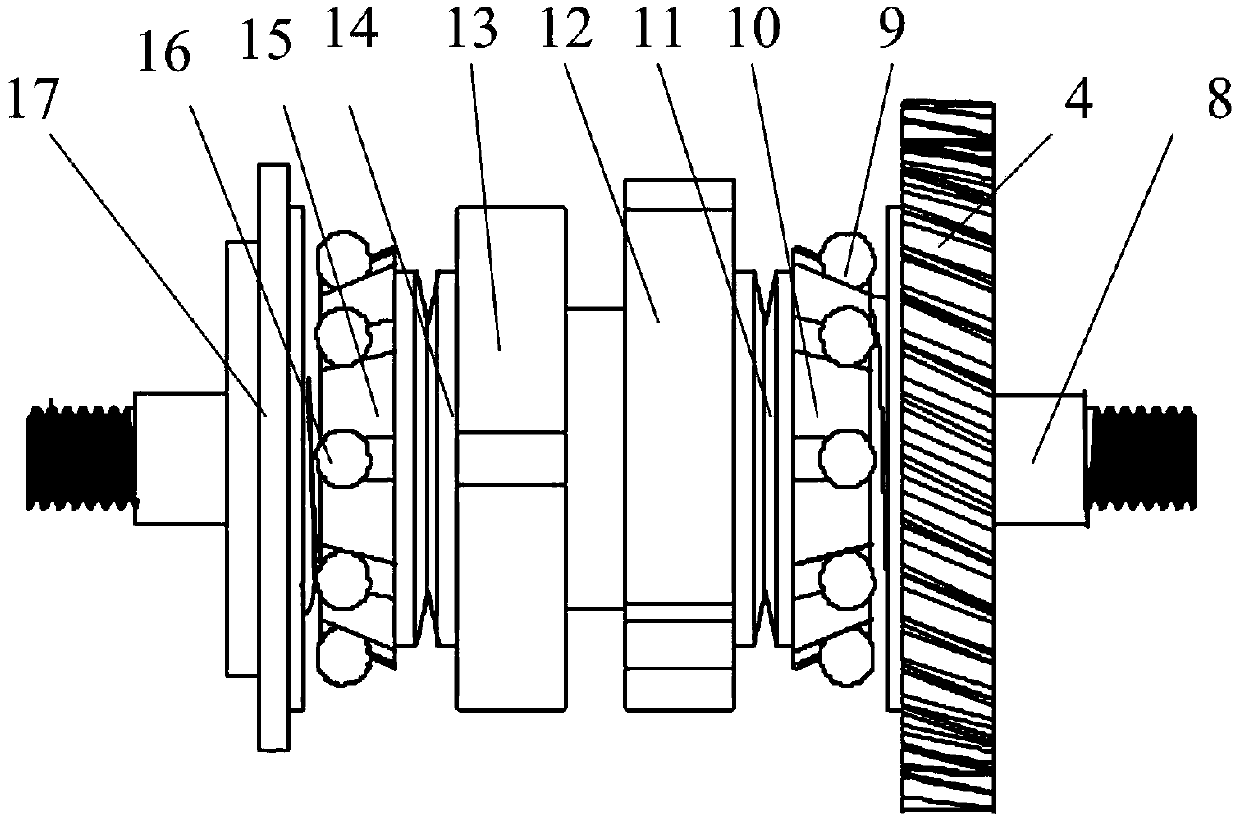
[0046] This embodiment provides an active-passive variable stiffness joint, which includes a stepping motor 1, a motor mount 2, a joint output rod 3, a large helical gear 4, a torsion spring 5, a joint driving rod 6, and a helical pinion 7. The central shaft 8, the first group of steel balls 9, the first cone 10, the first disc spring 11, the first slider 12, the second slider 13, the second disc spring 14, the second cone 15, the second Group steel ball 16, left end cover 17, first compression spring 18, right-handed nut 19, left-handed nut 20, sleeve 21, second compression spring 22, first bushing 23, second bushing 24, chute 211, steel ball slot 102;
[0047] The stepper motor 1 is installed on the joint output rod 3 through the motor mount 2, and the output end of the stepper motor 1 is connected to the helical pinion 7 through a key; a torsion spring 5 is wound on the outer surface of the sleeve 21, and the torsion spring One end of 5 is stuck in the groove of the joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More