

Inertial navigation high-precision positioning method based on binocular, acceleration and gyroscope
A technology of inertial navigation and positioning method, which is applied to navigation, surveying and mapping, navigation, navigation and other directions through speed/acceleration measurement, which can solve the problems of not being able to eliminate the cumulative error of inertial navigation and the complexity of related algorithms, and achieve good real-time performance , simple tools and processes, improved stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
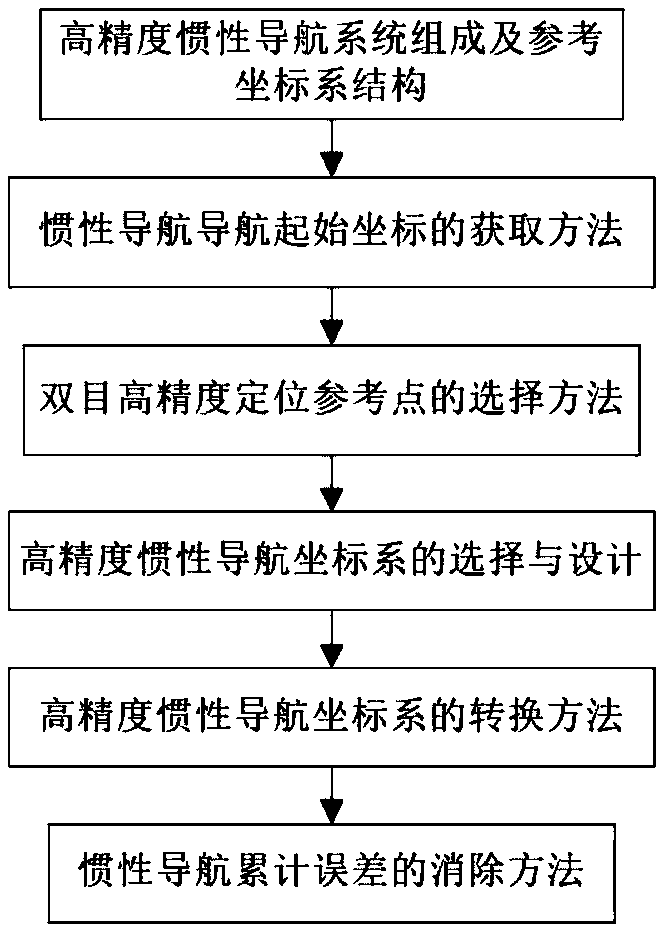
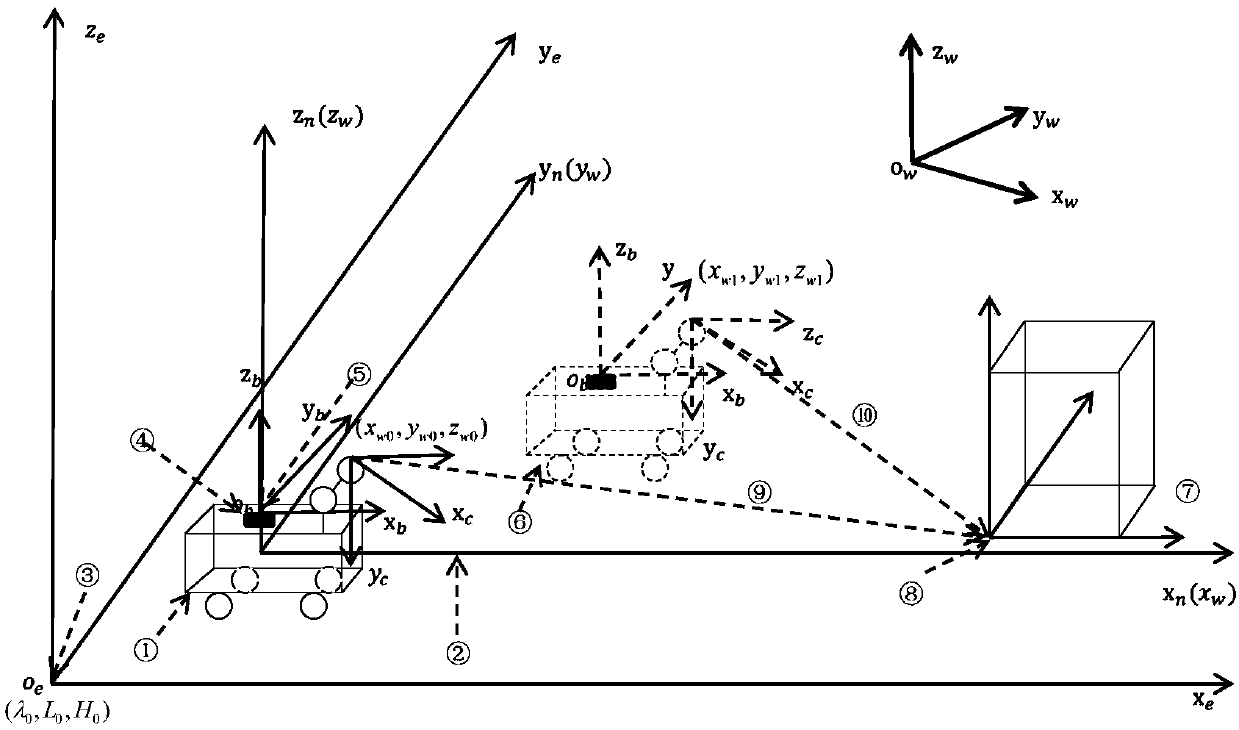
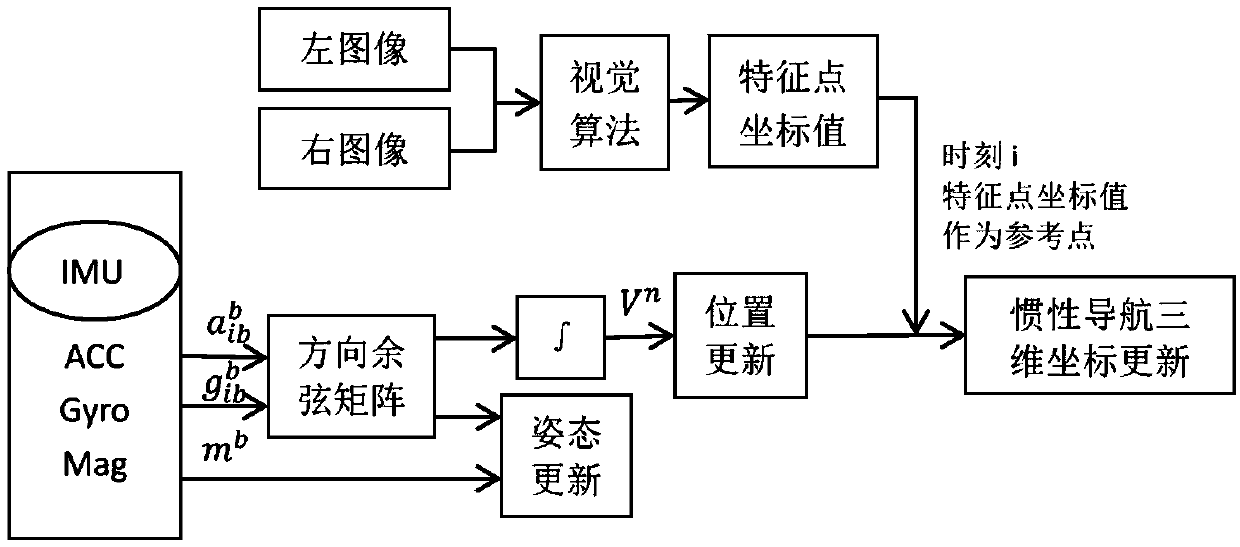
[0077] The purpose of the present invention is to determine the three-dimensional coordinates of the feature points of the inertial navigation reference position based on binocular positioning + high-precision GPS information, and use the coordinate values of the feature points as reference points to update the three-dimensional coordinates of the inertial navigation in real time to eliminate the cumulative error caused by the integration of the inertial navigation , to achieve precise positioning based on inertial navigation and binocular positioning combined with auxiliary indoor parking lot vehicles. To achieve this purpose, the specific implementation methods are as follows:
[0078] According to the actual situation, when the vehicle enters the parking lot and completes the whole process of parking, the present invention firstly provides a method for acquiring the initial coordinates of the inertial navigation. In the present invention, the important condition that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More