

Velocity model-assisted underwater intelligent navigation method based on dynamics
A technology of dynamic model and speed model, applied in non-electric variable control, three-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve problems such as paralysis, navigation system error increase system, navigation positioning deviation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] In order to more clearly understand the above objects, features and advantages of the present invention, the present invention will be further described below with reference to the accompanying drawings and embodiments. It should be noted that the embodiments of the present application and the features in the embodiments may be combined with each other in the case of no conflict.
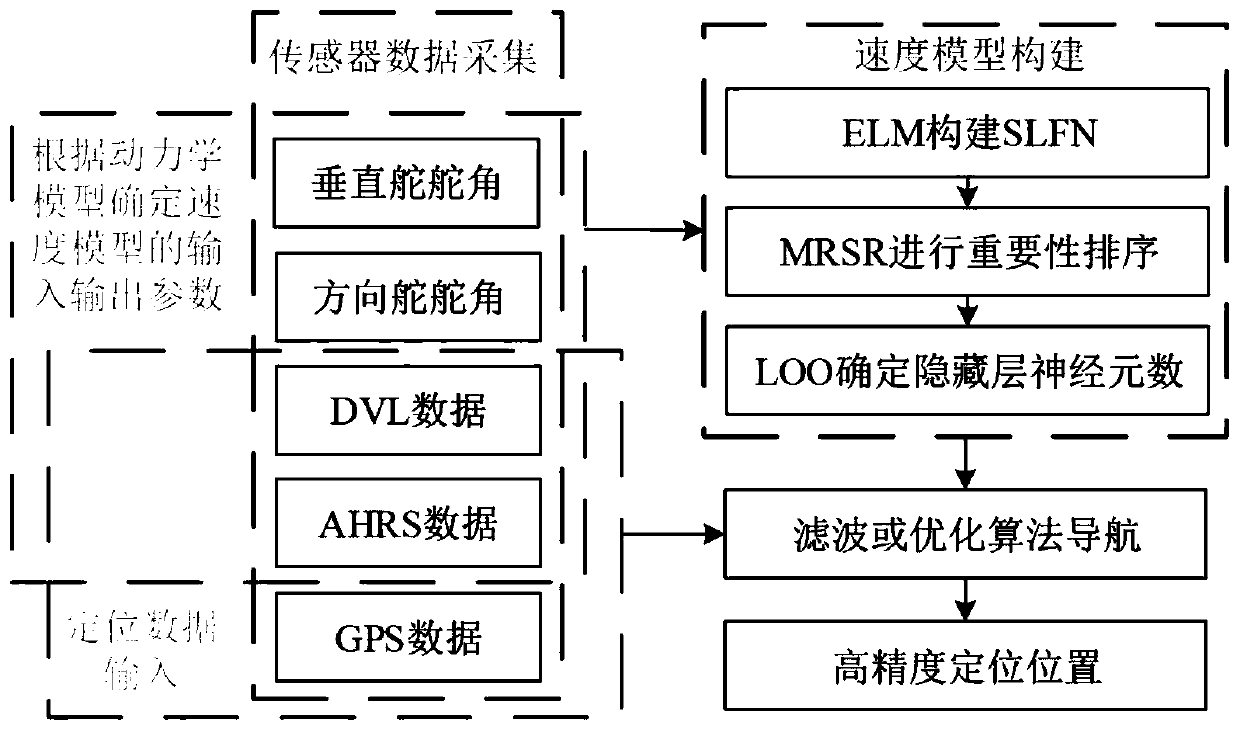
[0059] Dynamics-based velocity model assisted underwater intelligent navigation method, the schematic diagram is as follows figure 1 shown, including the following steps:
[0060] Step 1, the AUV sails into the water, and periodically collects onboard sensor information, the sensor information includes the speed information of the DVL, the acceleration, angular velocity and angle information of the AHRS, the rotational speed information of the propeller, and the rudder angle information of the rudder blade;
[0061] Step 2: Using the dynamic model idea for reference, determine the input vari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More