

Magnetic simulation muscle structure
A muscle and magnetic force technology, applied in the field of electromagnetic drive devices, can solve problems such as the inability to control the electromagnet to stay in a certain magnetic circuit position, the inability to realize the control of fine movements, and the inability to accurately control the connection stroke, etc., to achieve light weight and high The effect of acceleration and mechanical wear is small
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
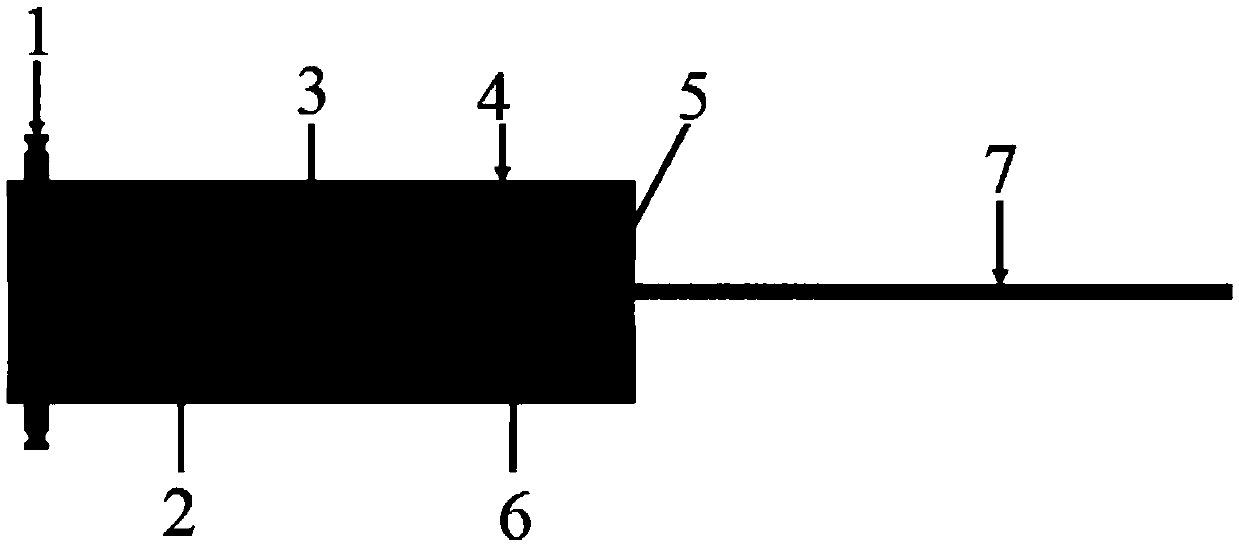
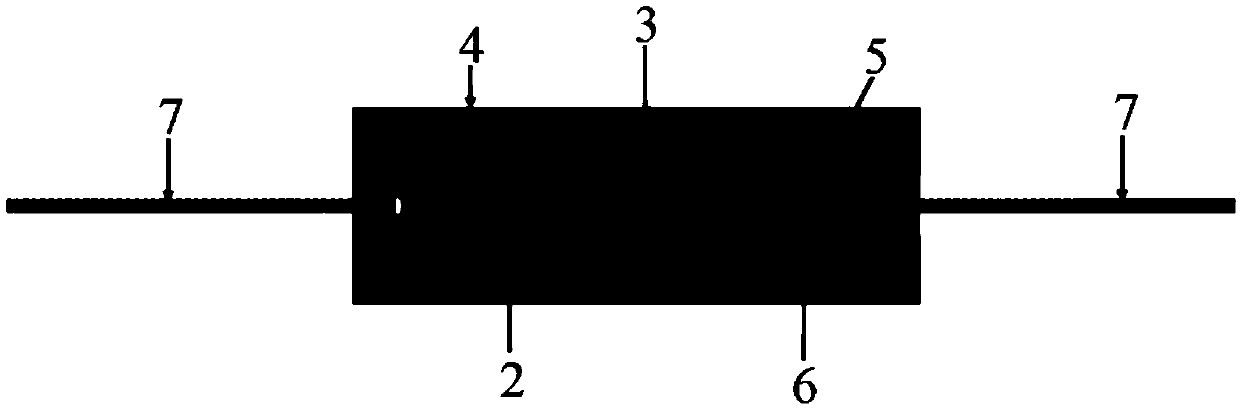
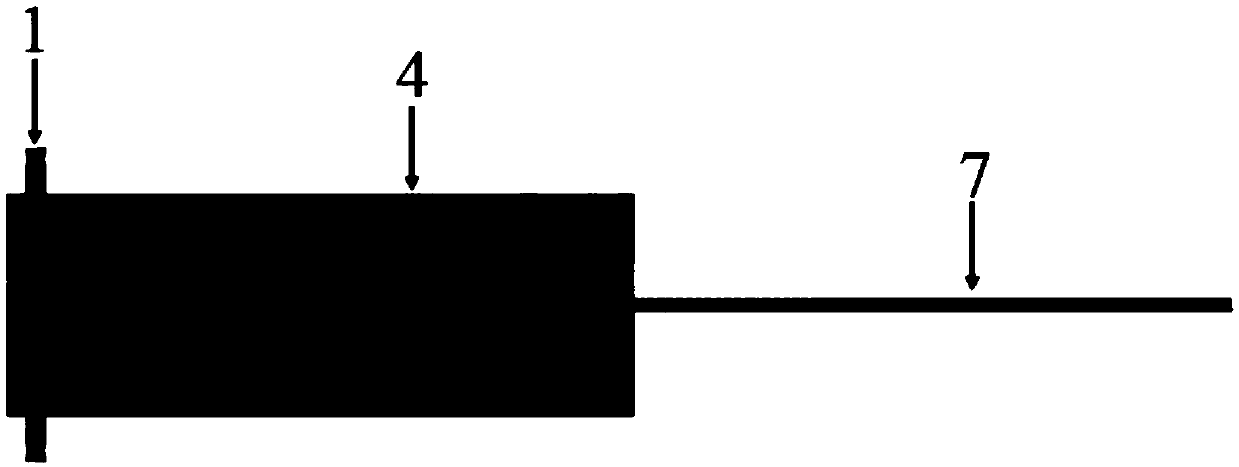
[0025] The repulsive force of the electromagnet is proportional to the voltage, that is, the higher the voltage, the higher the repulsive force, and vice versa. However, compared with the magnetic adsorption of the prior art, when the magnetic field 3 generates a certain amount of repulsive force, the magnet 2 immediately Propelled by the repulsive force, when reaching a certain distance, the magnet 2 stops moving and can only continue moving after further voltage is provided. Generate electromagnetic repulsion force with the permanent magnet 5 of the second module, thereby pushing away from each other. However, the second module in the first module is pushed by the electromagnetic repulsion force and gradually moves away from the first module. At this time, through this special structure, the traction wire harness 7 is converted into a pulling force, and this certain amount of pulling force can be maintained. , and change according to the level of the electromagnetic repulsio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More