

Kinematics Calibration Method of Industrial Robot Based on Coordinate Measuring Instrument
A technology of robot kinematics and coordinate measuring instrument, applied in the field of robotics, can solve problems such as parameter identification matrix dissatisfaction with rank, model dissatisfaction with continuity and minimization, identification result deviation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings, wherein the same or similar reference numerals refer to the same or similar elements or elements having the same or similar functions throughout. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
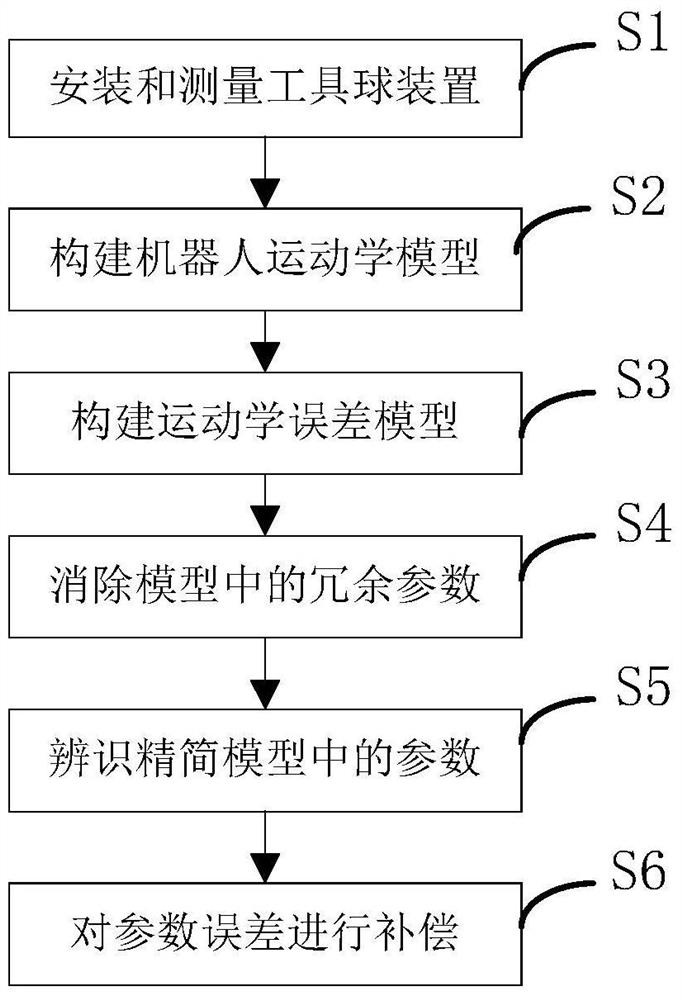
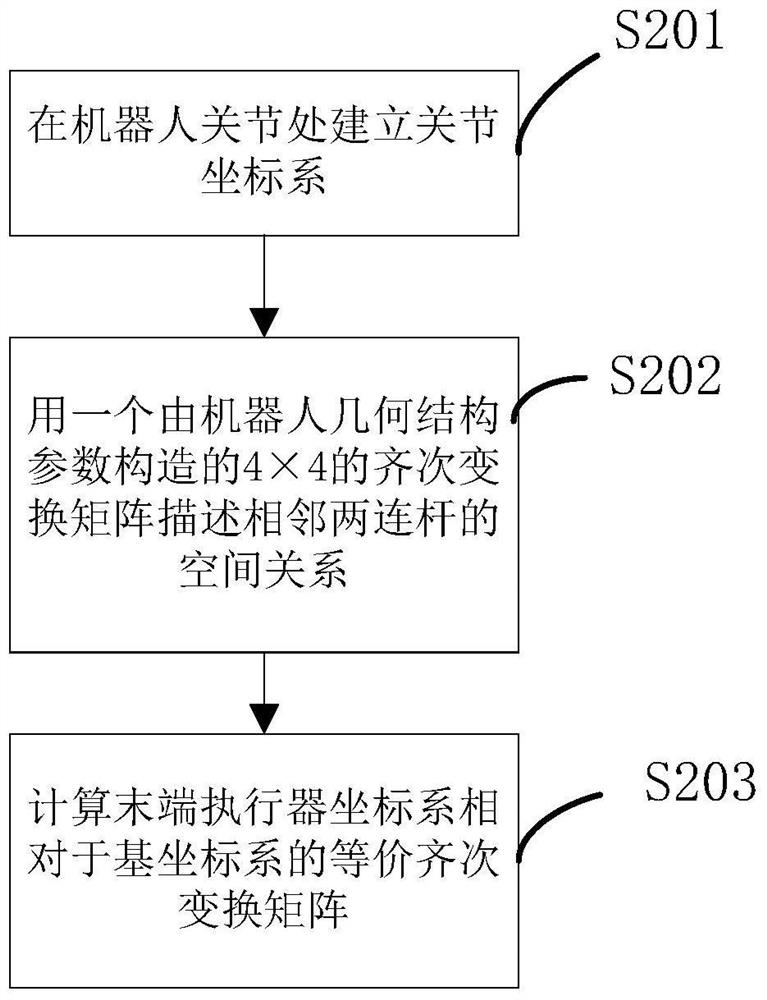
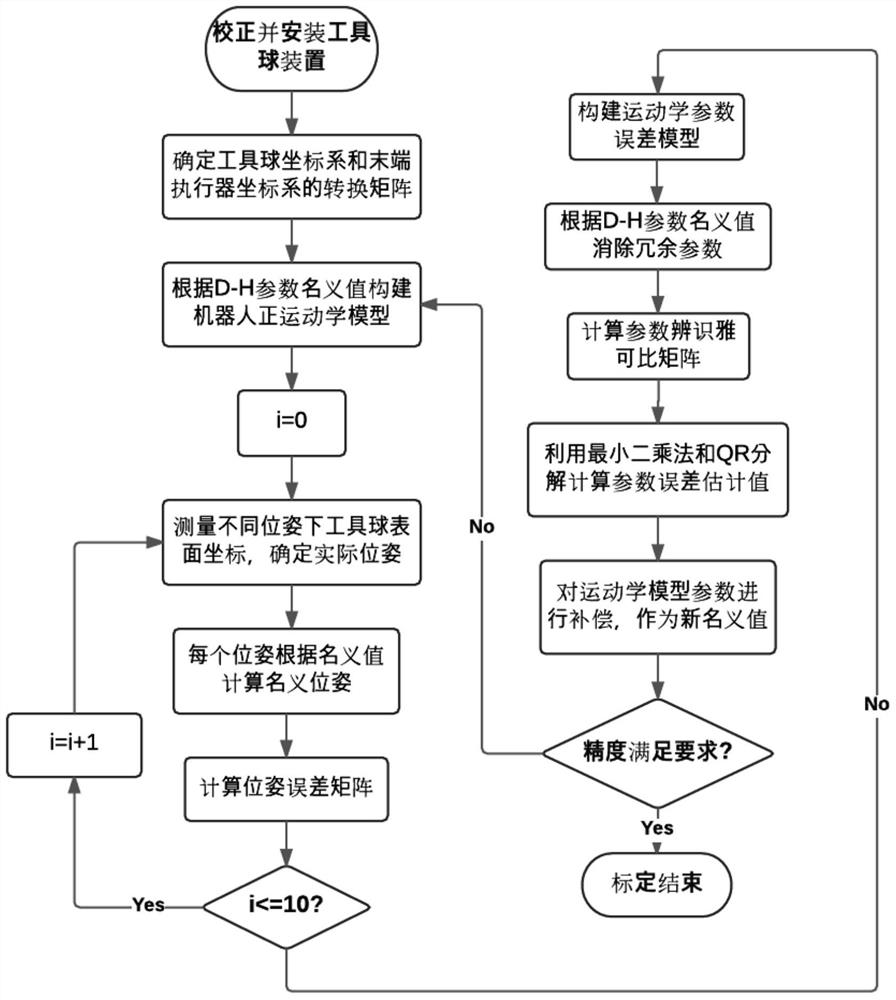
[0063] The present invention provides a kinematics calibration method of an industrial robot based on a coordinate measuring instrument. Figure 1-3 , Step S1, install and measure the tool ball device, establish a tool ball coordinate system and calculate the pose of the tool ball coordinate system.
[0064] In step S1, the tool ball device includes two parallel aluminum disks, four aluminum rods are arranged between the two aluminum disks, one of the aluminum disks is attached to the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More