

Trajectory control system and method for multiple robots
A trajectory control, multi-robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of interpolating step size and rate robot collision, unable to know the robot motion trajectory, unable to know the robot state and other problems, to ensure Track accuracy consistency, reduce occupation, and ensure the effect of consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments disclosed in the present invention will be further described in detail below in conjunction with the accompanying drawings.
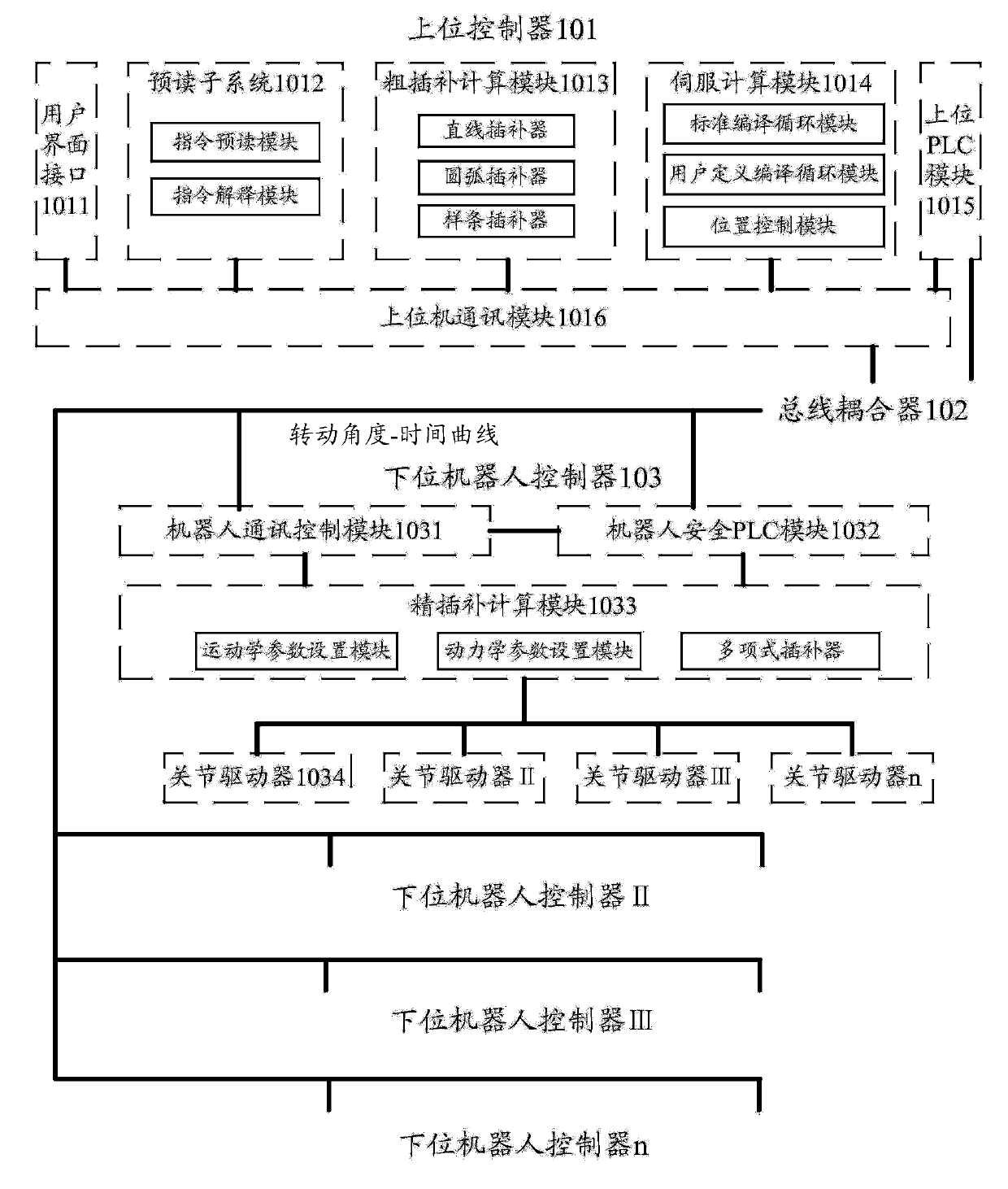
[0038] like figure 1 , in this embodiment, the trajectory control system for multi-robots includes:
[0039] Host controller 101 , which is used to calculate the rotation angle-time curve according to the received NC command.
[0040] In this embodiment, the host controller 101 is the master control unit of the motion trajectories of multiple robots in the entire system, and may mainly include:
[0041] User Interface Interface 1011 , used to receive the CNC commands input by the user.
[0042] In this embodiment, the user interface 1011 is an interface for the user to input numerical control commands, and the user inputs the numerical control commands to the host controller interface through the keyboard, USB or Ethernet.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More