

Unmanned aerial vehicle and unmanned ground robot collaborative tracking and obstacle avoidance system and method
A robot and unmanned aerial vehicle technology, applied in two-dimensional position/course control, attitude control, three-dimensional position/course control, etc., can solve problems such as insufficient economy, navigation deviation, collision damage, etc., and achieve the goal of reducing casualties risk, improved positioning accuracy, and high mobility effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
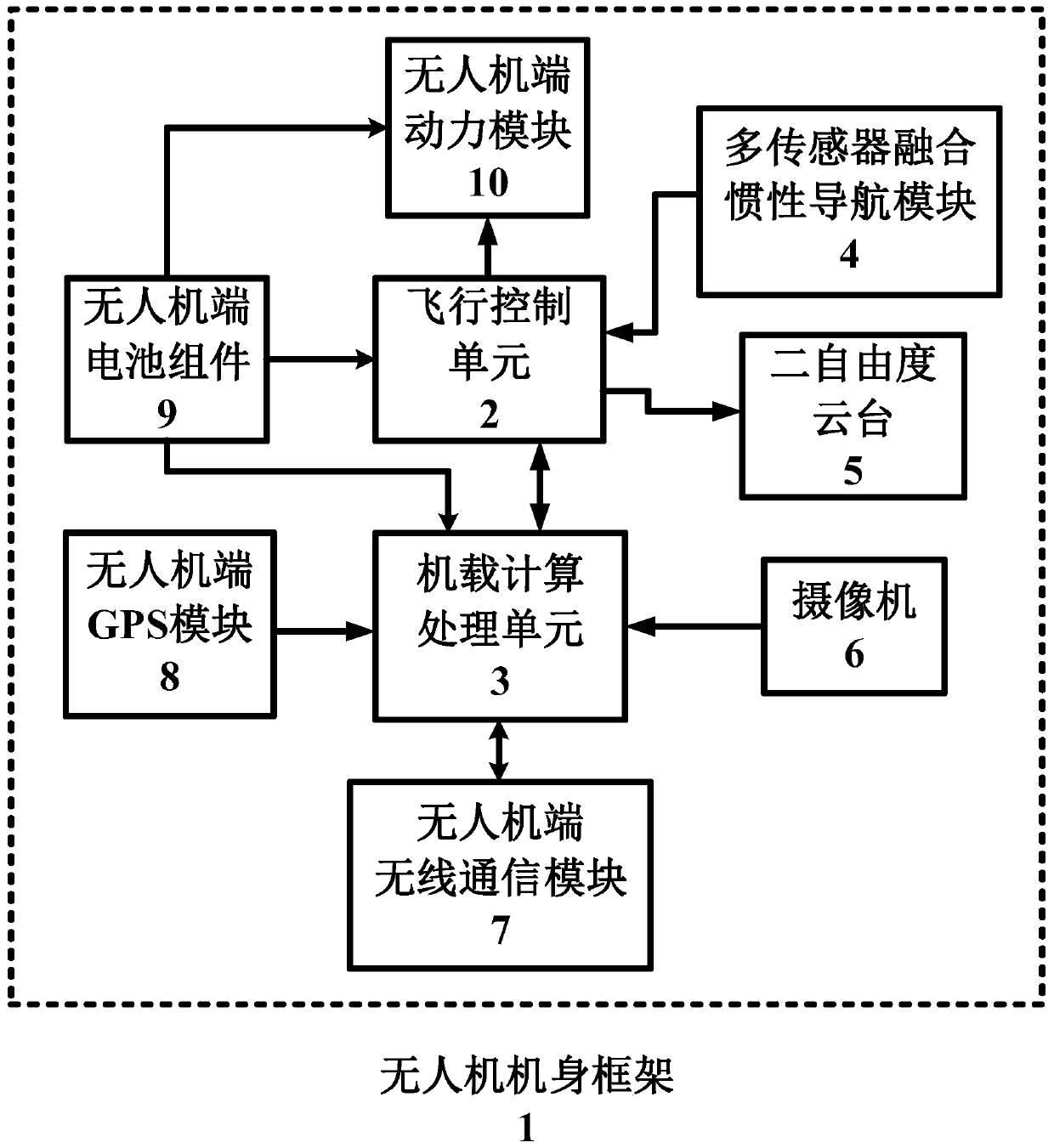
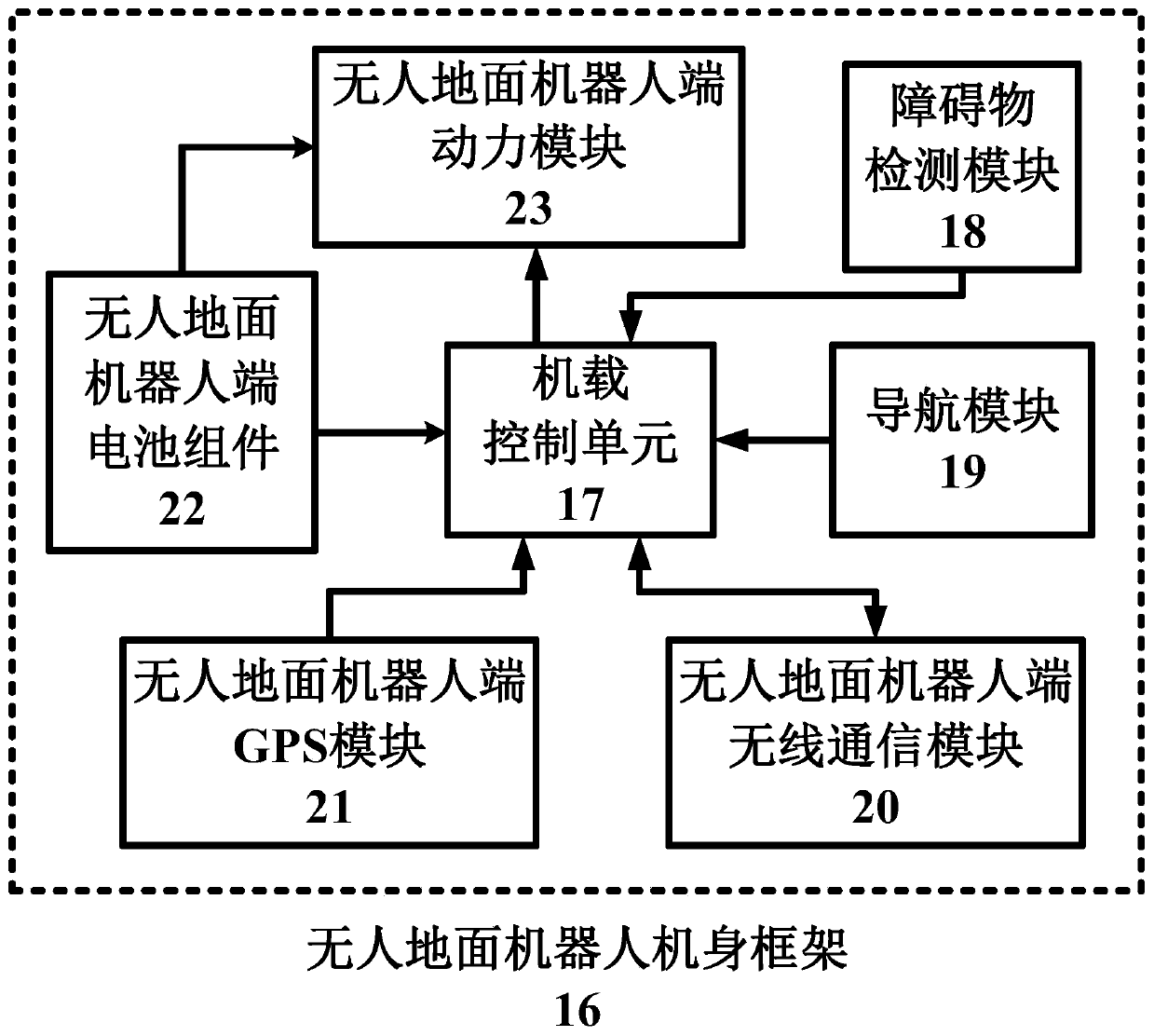
[0050] Such as figure 1 As shown, a kind of unmanned aerial vehicle and unmanned ground robot cooperative path obstacle avoidance system is provided in this embodiment, including unmanned aerial vehicle and unmanned ground robot,
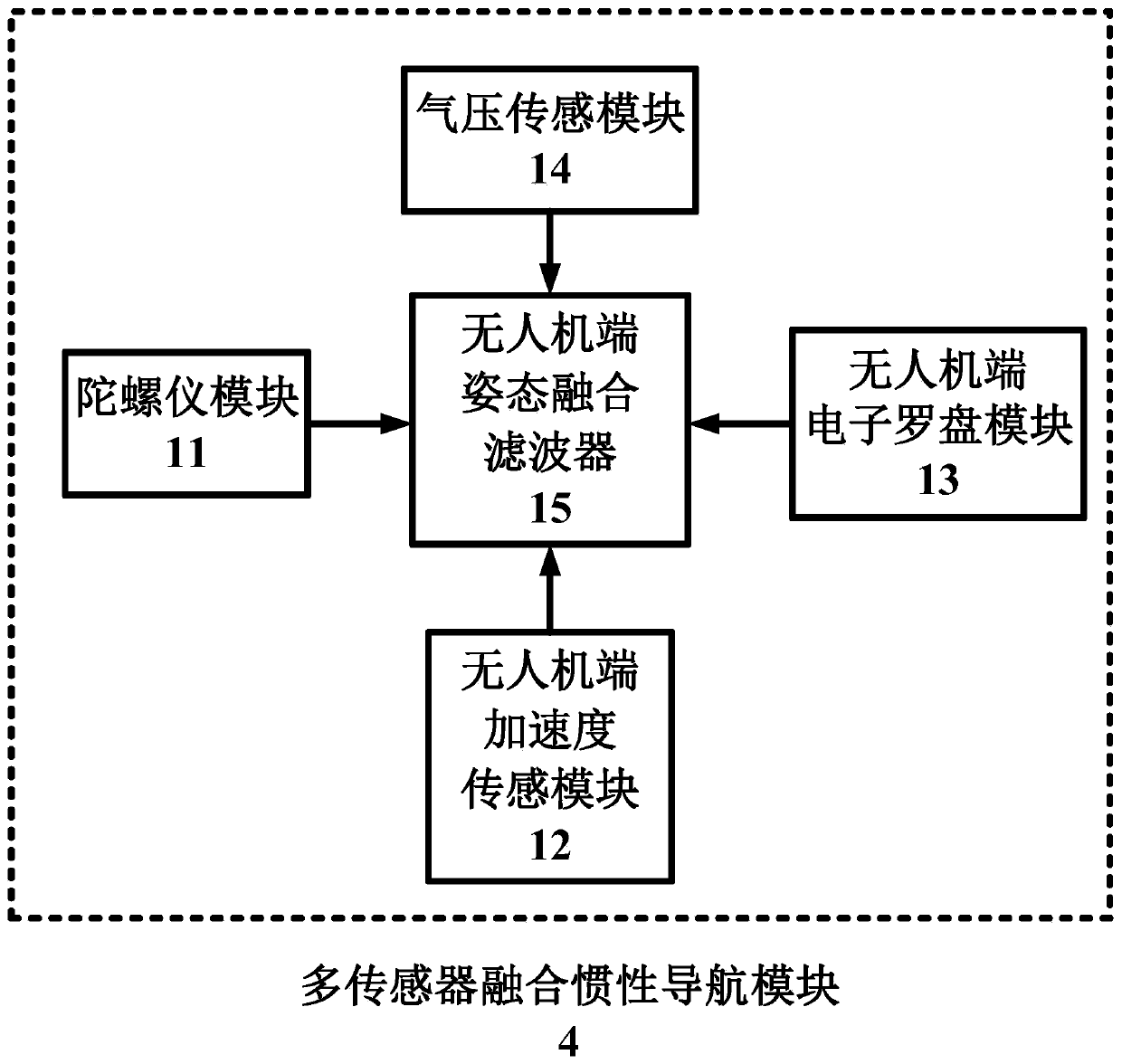
[0051] The UAV includes: UAV body frame 1, flight control unit 2, on-board computing processing unit 3, multi-sensor fusion inertial navigation module 4, two-degree-of-freedom pan-tilt 5, camera 6, UAV terminal wireless Communication module 7, drone-side GPS module 8, drone-side battery assembly 9 and drone-side power module 10,
[0052] The flight control unit 2 is connected to the UAV-side airborne computing and processing unit 3, the multi-sensor fusion inertial navigation module 4, the two-degree-of-freedom platform 5 and the UAV-side power module 10, and the UAV-side airborne The computing processing unit 3 is connected with the wireless communication module 7 of the UAV end and the GPS module 8 of the UAV end, the camera 6 is installed on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More