

Depth Q learning-based UAV (unmanned aerial vehicle) environment perception and autonomous obstacle avoidance method
A technology of environment perception and UAV, which is applied in the research fields of quadrotor UAV environment perception and autonomous obstacle avoidance, UAV environment perception and autonomous obstacle avoidance, and design of UAV intelligent path planning, which can solve algorithm failure , safety path lag, poor robustness and other issues, to achieve the effect of improving real-time performance, ensuring safety and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
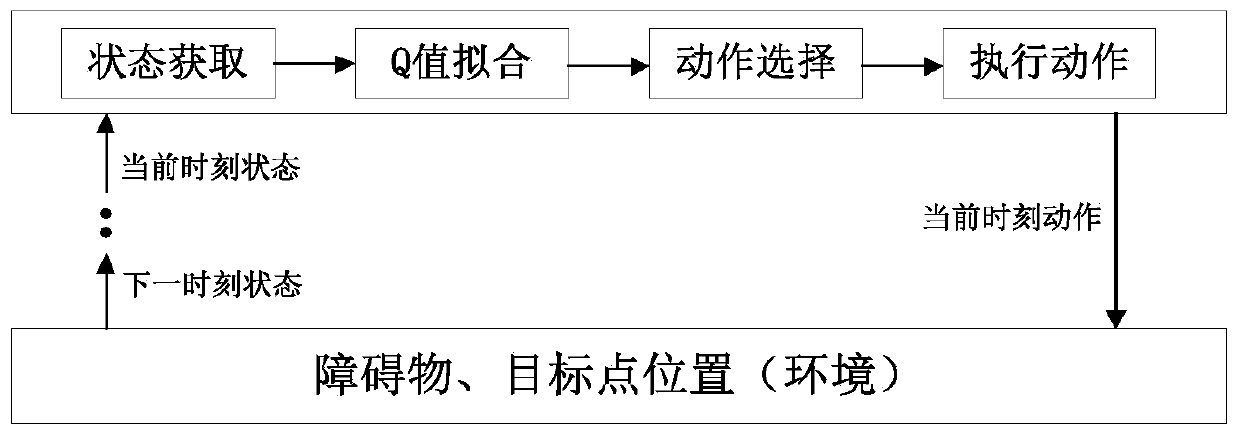
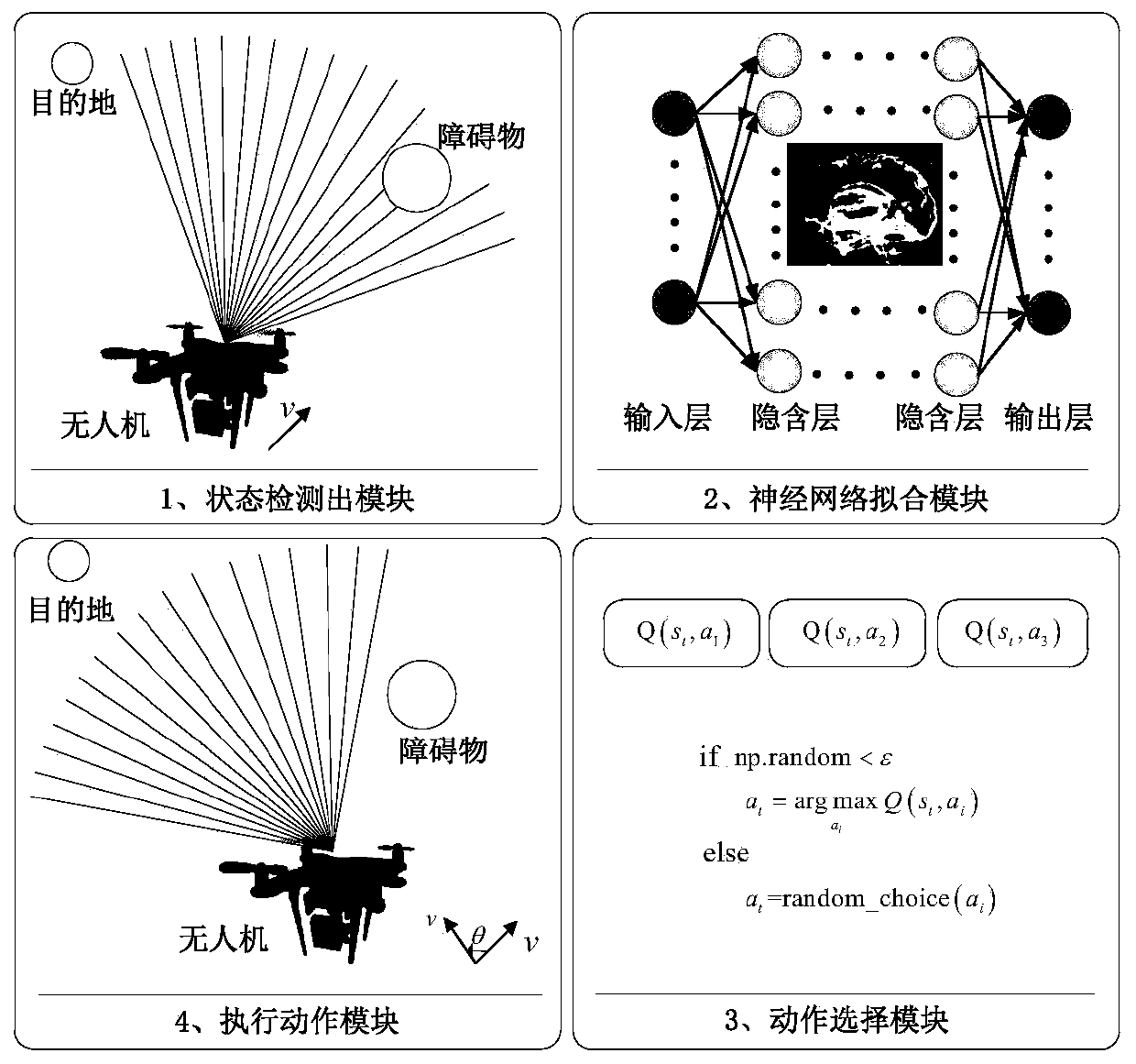
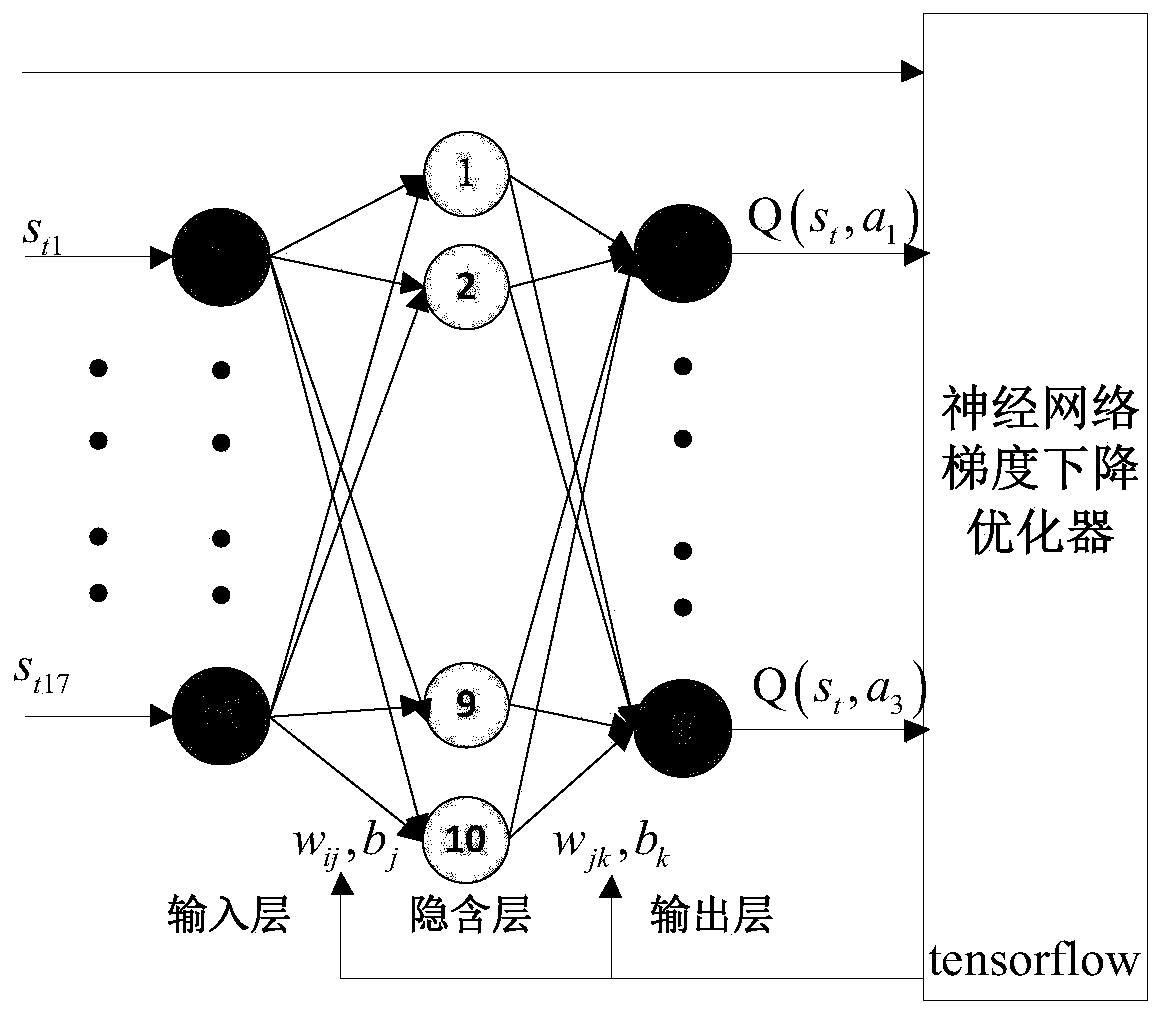
[0066] In order to overcome the shortcomings of poor robustness of the traditional UAV autonomous obstacle avoidance algorithm, in the research of the present invention, relying on the deep reinforcement learning algorithm in the field of artificial intelligence that has attracted the attention of all parties, the perception distance and distance between the UAV and the obstacle are established. The mapping between UAV obstacle avoidance strategies, through deep reinforcement learning network, proposes a quadrotor UAV perception and obstacle avoidance method based on deep Q-learning algorithm. This method uses the radar detector in front of the UAV to detect the flying environment within a certain range in front, which can avoid the influence of factors such as climate and distance to the greatest extent, and improve the robustness of the algorithm; at the same time, using the detection information as the original data, Using the deep Q-learning network can directly generate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More