

Design method of random system tracking controller with multiplicative noise and time delay
A tracking controller, random system technology, applied in instrumentation, computing, electrical digital data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The present invention will be further described below in conjunction with specific simulation examples. The design goal of the present invention is to design an optimal tracking controller, which can ensure the stability of the system and have good tracking performance. In the specific implementation process, it is realized with the help of the simulation tool Matlab.
[0094] The first step is to set the system parameters.
[0095] , , , , , , , , , , , , , the initial state is , , .
[0096] The second step is to solve the controller gain and design the tracking controller according to the recursive algorithm.
[0097] The third step is system stability and tracking performance inspection.
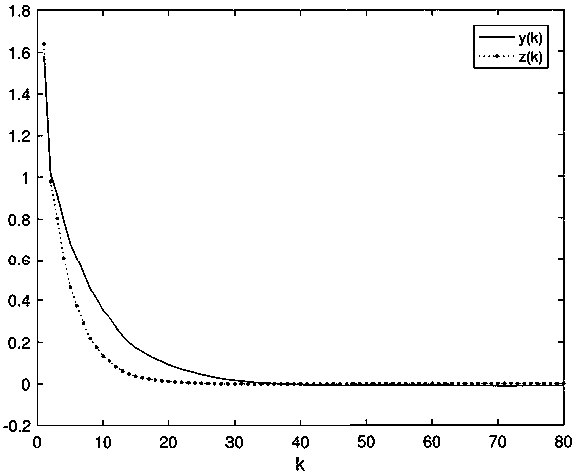
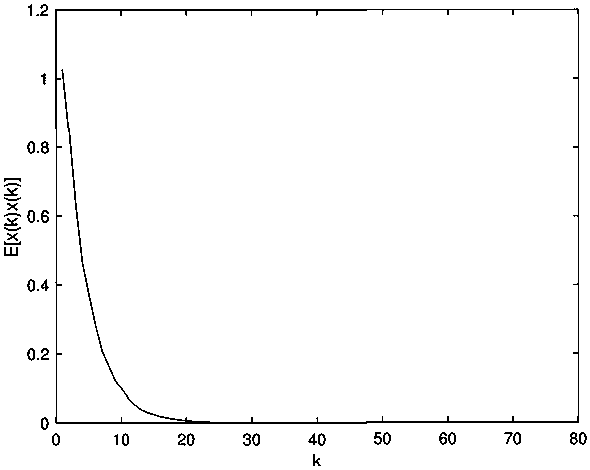
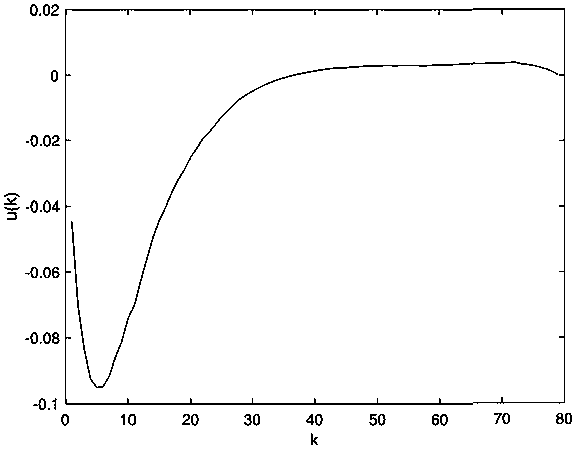
[0098] This step will test whether the system stability and tracking meet the design requirements, and realize it with the help of Matlab drawing tool. Depend on Figure 1-3 We can see that the designed controller can quickly stabilize the syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More