

Method and system for visual servo controlling and equipment
A visual servo and control model technology, applied in the field of visual servo control, can solve the problems of time-consuming algorithm, slow speed, large estimation error, etc., and achieve the effect of improving accuracy, increasing speed, and meeting the requirements of adaptability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The core of this application is to provide a method, system, equipment, and computer-readable storage medium for visual servoing control to improve the accuracy and speed of visual servoing control.
[0060] In order to make the purpose, technical solutions and advantages of the embodiments of this application clearer, the technical solutions in the embodiments of this application will be described clearly and completely in conjunction with the drawings in the embodiments of this application. Obviously, the described embodiments It is a part of the embodiments of this application, but not all the embodiments. Based on the embodiments in this application, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of this application.
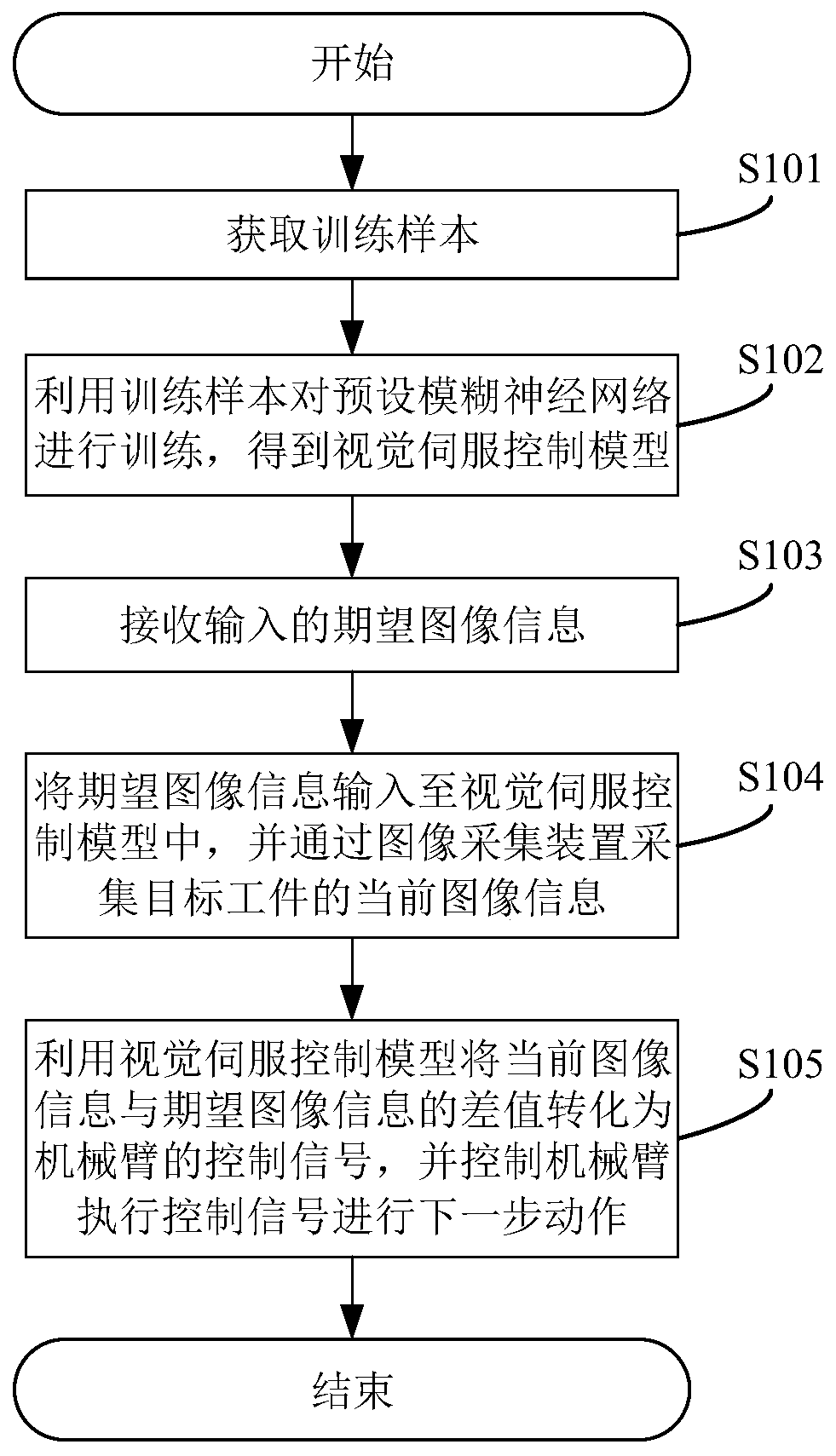
[0061] Please refer to figure 1 , figure 1 This is a flowchart of a method for visual servoing control provided by an embodiment of this application.
[0062] It specifically inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More