

Method of grabbing shape symmetrical workpiece with high precision by using low precision depth camera
A depth camera, high-precision technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of point cloud reduction in grasping pose estimation accuracy, high-precision depth cameras are expensive, and manufacturers have high production costs. Achieve the effect of improving point cloud integrity, grasping speed and system stability, and reducing running time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
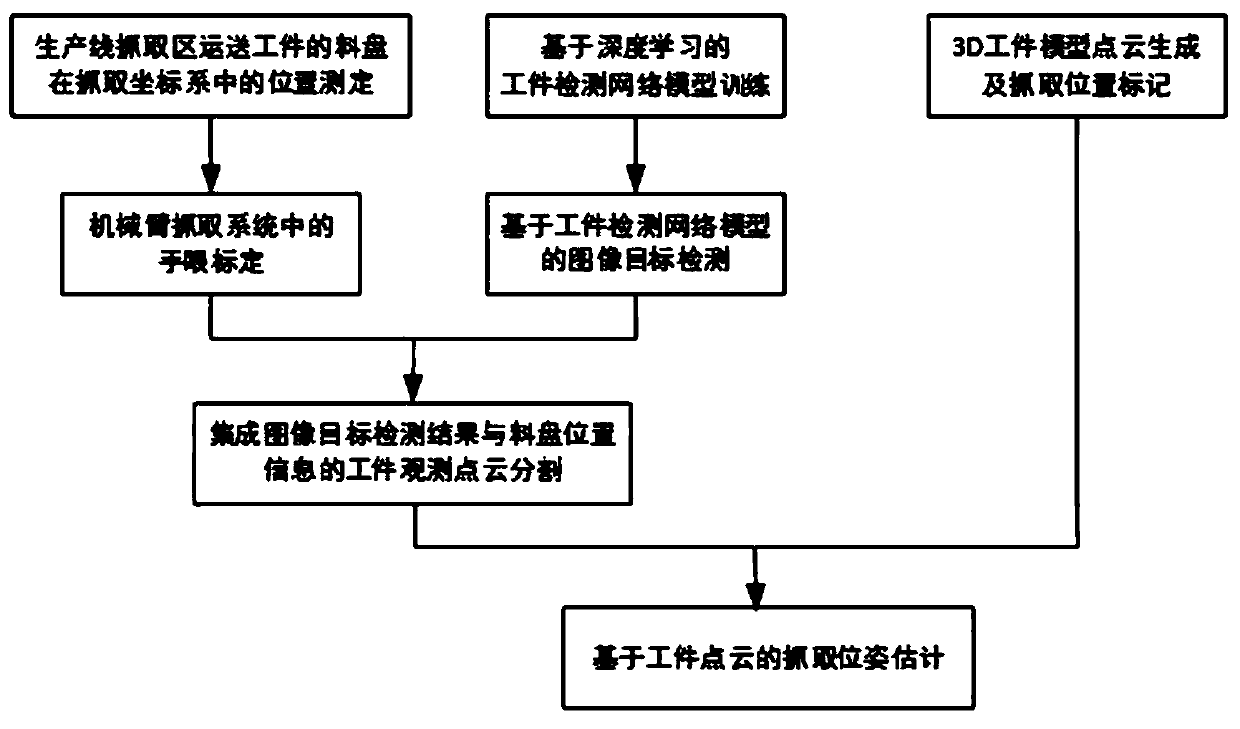
[0082] The robotic arm grabbing system built by a manufacturing company includes a YaMaha four-axis robotic arm with a maximum opening width of 1.7cm at the end of the robotic arm, an Intel RealSense D415 depth camera and an industrial computer with a main frequency of 3.3GHz. The workpiece to be grasped is placed in the tray and transported on the production line. The workpiece is symmetrical along the central axis and the width is about 1cm. In actual production, when workers manually insert workpieces into the round holes of the tray, it is impossible to ensure that each workpiece is inserted vertically, and there will be tilting. In order to ensure that the mechanical arm automatically grabs the workpiece from the tray of the production line, there will be no grasping errors. , the design technical scheme is as follows:
[0083] The first part is to measure the position of the pallet transporting the workpiece in the grabbing area of the production line in the grabbing c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More