Diving positioning method of AUV with large diving depth
A positioning method and a technology with a large diving depth, which is applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems of high installation accuracy, time-consuming large ships, and expensive auxiliary navigation equipment on the water surface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0110] Specific embodiment 1: The deep AUV positioning method of this embodiment includes:
[0111] Step 1: The deep AUV is equipped with an underwater communication node (underwater modem), temperature and salt depth and strapdown inertial navigation system;
[0112] Step 2: Build a filter model for pure range error estimation of the deep AUV;
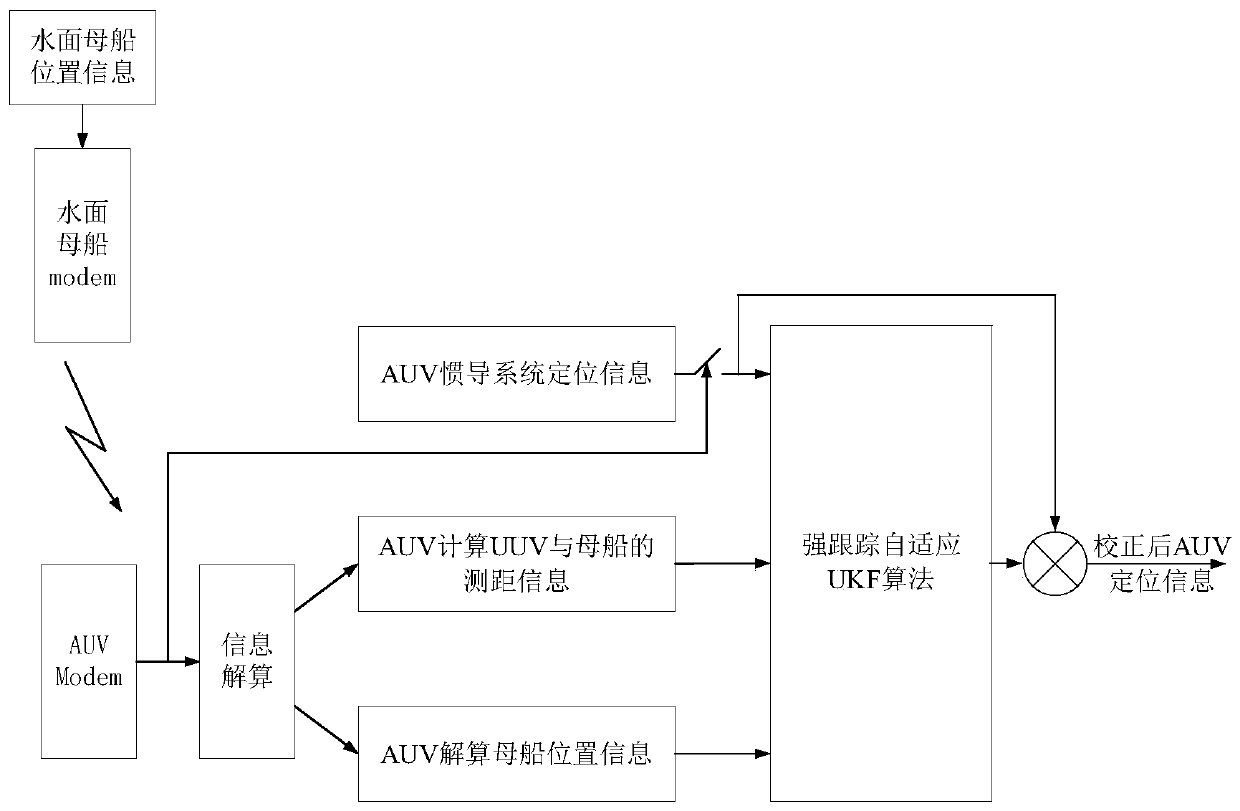
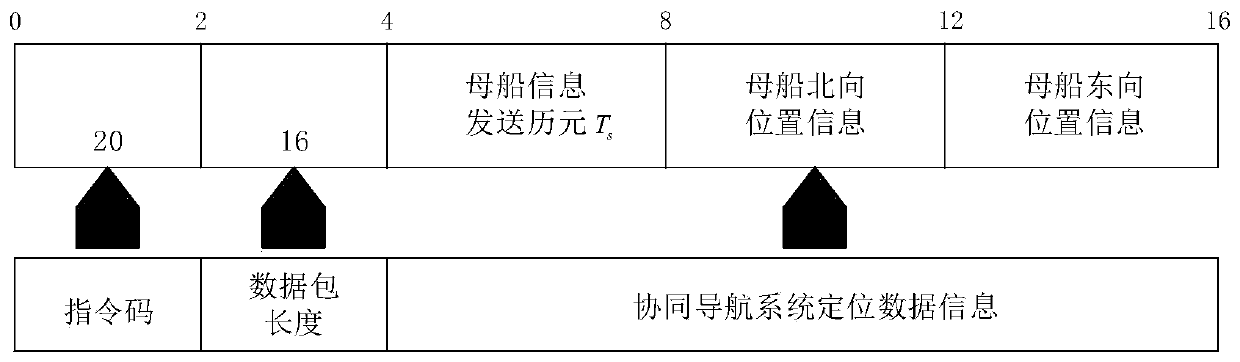
[0113] Step 3: Based on synchronized underwater acoustic communication, the surface mother ship sends to the AUV the horizontal position information and corresponding time information of the mother ship in the North-East-Earth (NED) navigation coordinate system at each time;
[0114] Step 4: The AUV records the strapdown inertial navigation system positioning information and the depth, temperature and conductivity (obtained salinity) information output by the thermo-salt depth sensor at the time when the information is received by its own underwater acoustic communication system;
[0115] Step 5: Based on the synchronous underwater acoustic com...
specific Embodiment approach 2
[0119] Specific embodiment two: this embodiment is different from specific embodiment one in that step one is specifically:
[0120] Step 1: The deep AUV is equipped with an underwater communication node (underwater modem), and the surface mother ship is equipped with a surface communication node (surface modem). The underwater acoustic communication adopts the synchronization mode, that is, the time synchronization of the surface modem and the underwater modem;
[0121] Step 1: The deep AUV is equipped with a strapdown inertial navigation system to output the AUV's positioning information in the NED coordinate system and the speed information in the carrier coordinate system in real time;
[0122] Step 1: The large diving depth AUV is equipped with temperature and salt depth, which can output AUV diving depth information, temperature information of the AUV location, and seawater conductivity (obtain salinity information) in real time.
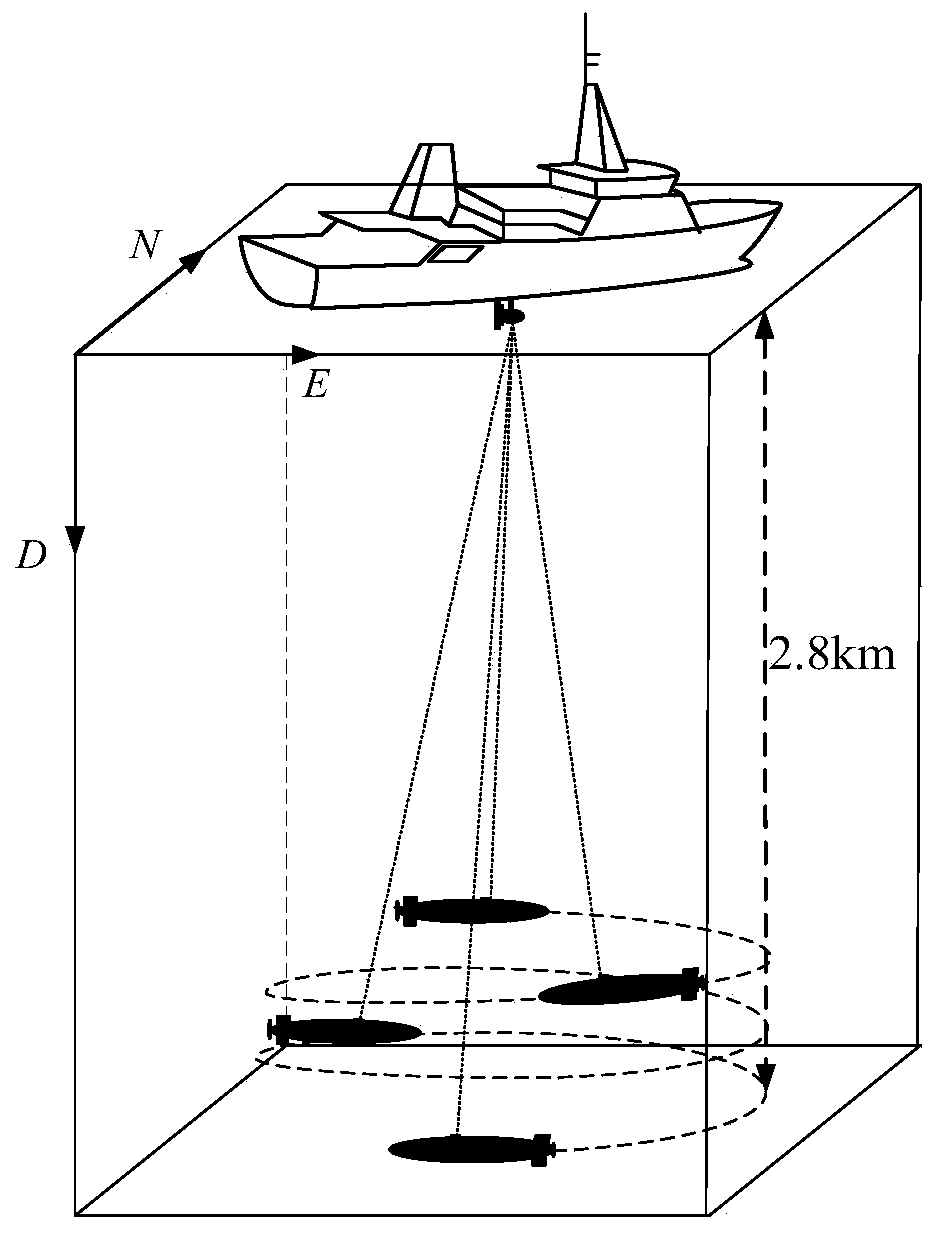
[0123] An application scenario of the present in...
specific Embodiment approach 3
[0124] Specific embodiment three: This embodiment is different from specific embodiment one in that step two is specifically:
[0125] Step 2: Assume that the position error and velocity error of the strapdown inertial navigation system are constant in a short time;
[0126] Step 2: Establish the discrete system equation of the pure range error estimation filter model for the deep AUV
[0127] X k =Φ k X k-1 +w k
[0128] among them
[0129]
[0130]
[0131] Where Is the position error of the inertial navigation system in the NED navigation coordinate system, In the AUV carrier coordinate system, longitudinal (along the longitudinal axis of the AUV x axis) and lateral (along the horizontal axis of the AUV y axis) velocity measurement error, T is the sampling time, w k ~N(0, Q), Q is w k The 4×4 covariance matrix, ψ, θ, γ are the heading, pitch and heel angles of the AUV, respectively.
[0132] Step two and three: The distance measurement information of the mother ship and AUV r k And ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com