

Fault-tolerant control method for car active front wheel steering system
A Technology of Active Front Wheel Steering and Fault-tolerant Control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0061] Such as Figure 1-5 Shown, a kind of fault-tolerant control method of automobile active front wheel steering system, comprises the following steps:
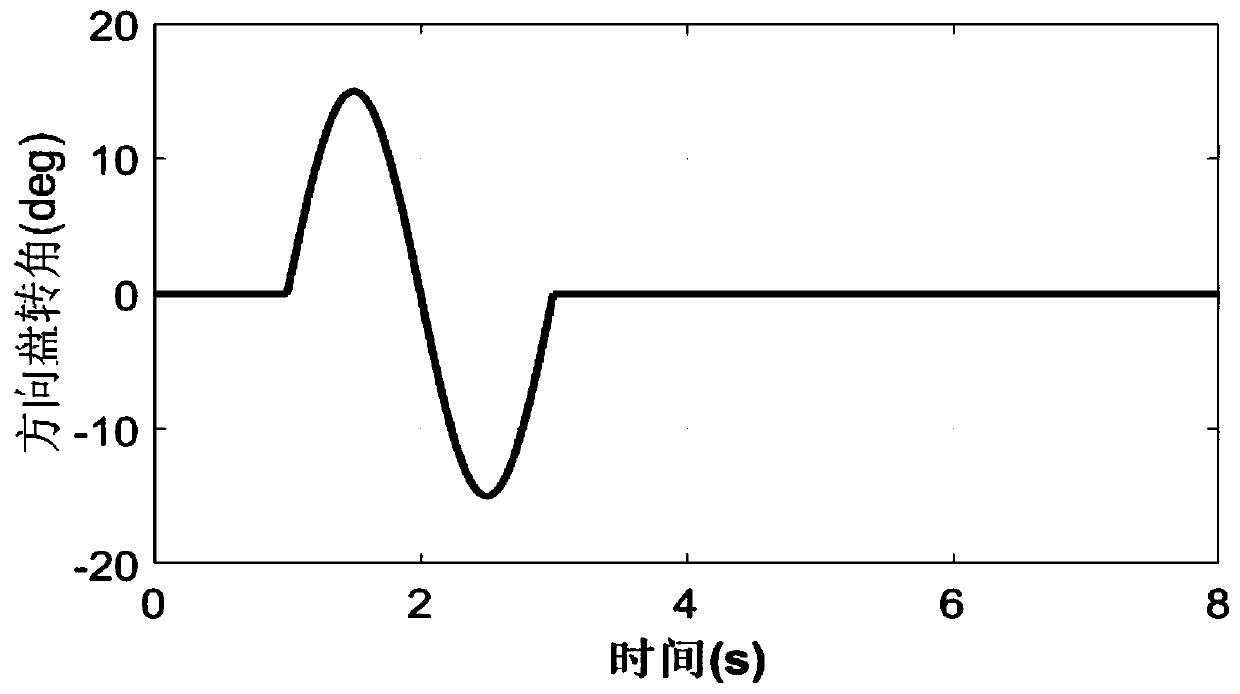
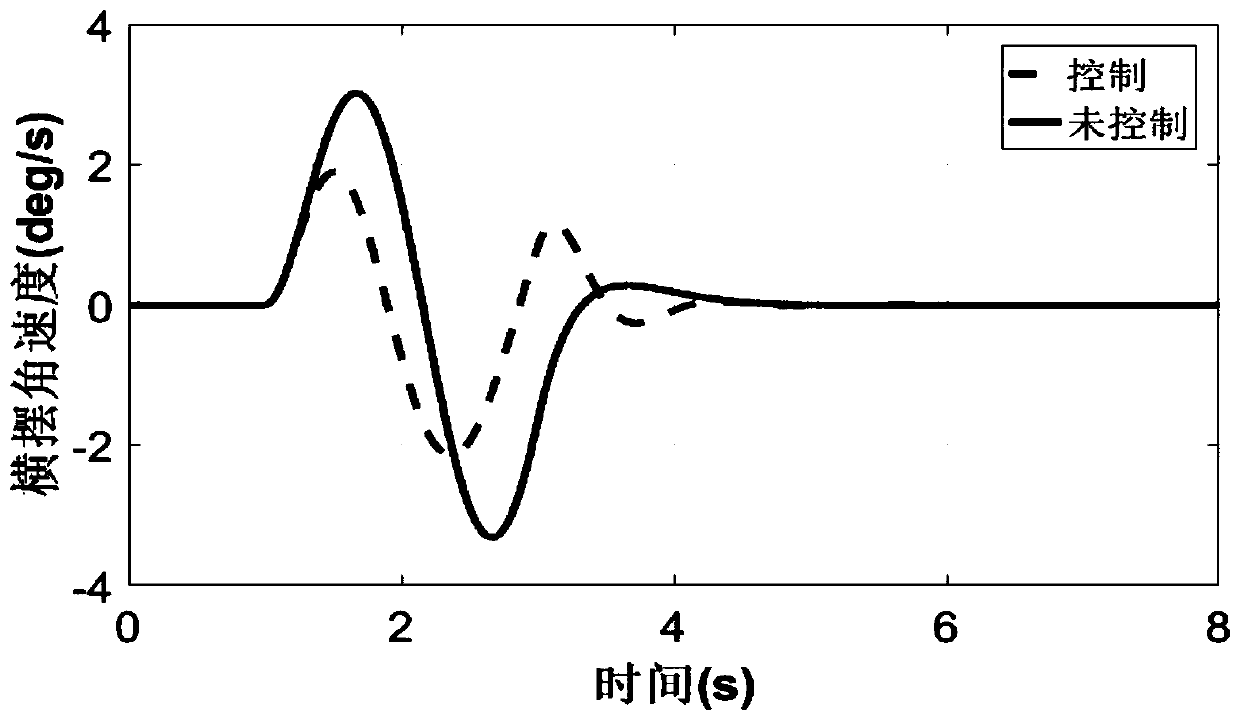
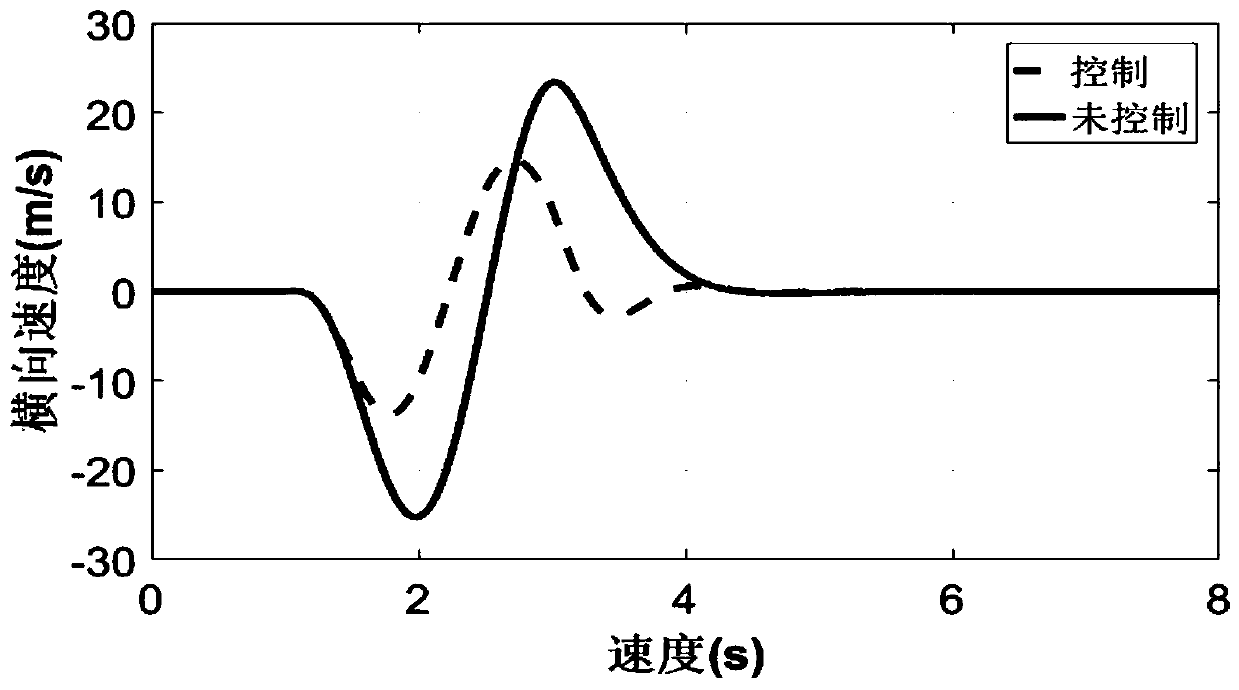
[0062] Step 1. Based on the ideal vehicle dynamics model of the front wheel steering system, it is used as a reference model during the operation of the vehicle to output the actual motion state information of the vehicle, including the vehicle lateral velocity, yaw rate, center of mass side slip angle and lateral tire force;
[0063] The specific construction process of the ideal vehicle front wheel steering system dynamics model is as follows:
[0064] Construct a dynamic model of the vehicle steering system:
[0065]
[0066] where v x and v y Respectively represent the longitudinal velocity and lateral ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More