

RRT unmanned aerial vehicle path planning method based on driver visual perception imitation
A technology of path planning and visual perception, which is applied in the control of finding targets, etc., can solve problems such as slow search speed and search failure, and achieve the effect of enhancing purpose, improving speed and good orientation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0043] Specific embodiment one: the RRT unmanned aerial vehicle path planning method of imitation driver's visual perception that this embodiment provides, specifically comprises the following steps:
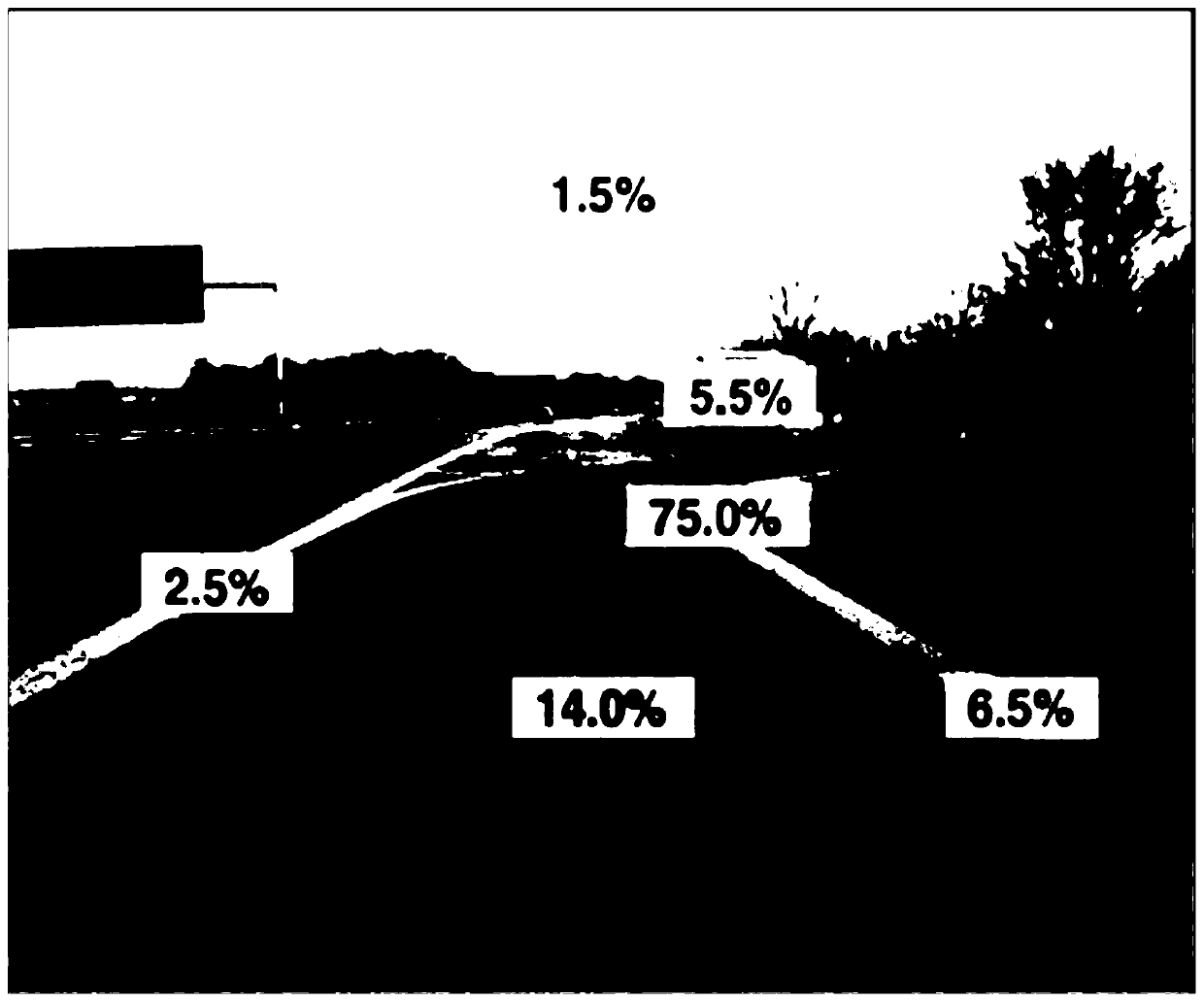
[0044] Setting several driver visual guidance points in the state space as the nodes that must pass through the path of the UAV can be regarded as the intermediate target points obtained by dividing the flight path into segments under the imitation of the driver's subjective consciousness. The driver visual guidance points The path between the starting point and the target point of the UAV is divided into multiple track segments; the improved RRT algorithm is used for path planning for each track segment, and the driver's visual perception is added to the RRT planning algorithm, which can make The algorithm has better orientation when searching, and the improved RRT algorithm introduces the idea of target bias in the traditional RRT algorithm (setting the probability threshold ...
specific Embodiment approach 2
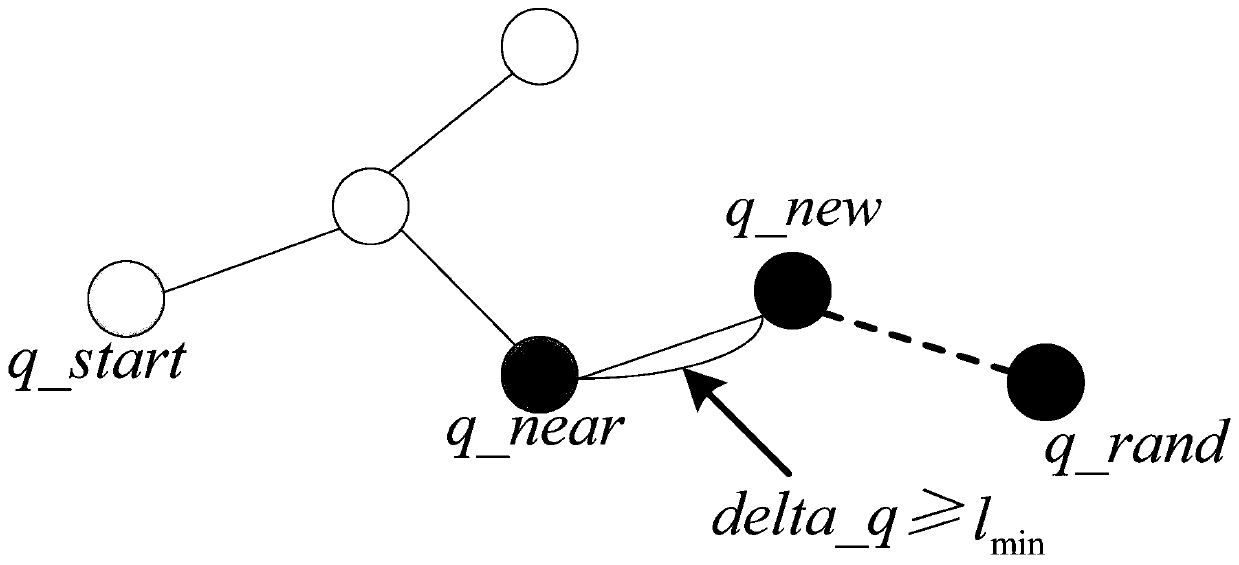
[0053] Specific implementation mode two: combination image 3 , Figure 4 The present embodiment is described. The difference between this embodiment and the specific embodiment one is that the improved RRT algorithm considers the constraints brought by the physical performance of the UAV itself and specifically includes:
[0054] Constrain the length of the UAV's minimum track segment l min Combined with the extended step delta_q in the RRT algorithm, it is guaranteed that the distance from the nearest neighbor point q_near to the extended step delta_q of the newborn node q_new is not less than l min ;Such as image 3 shown;
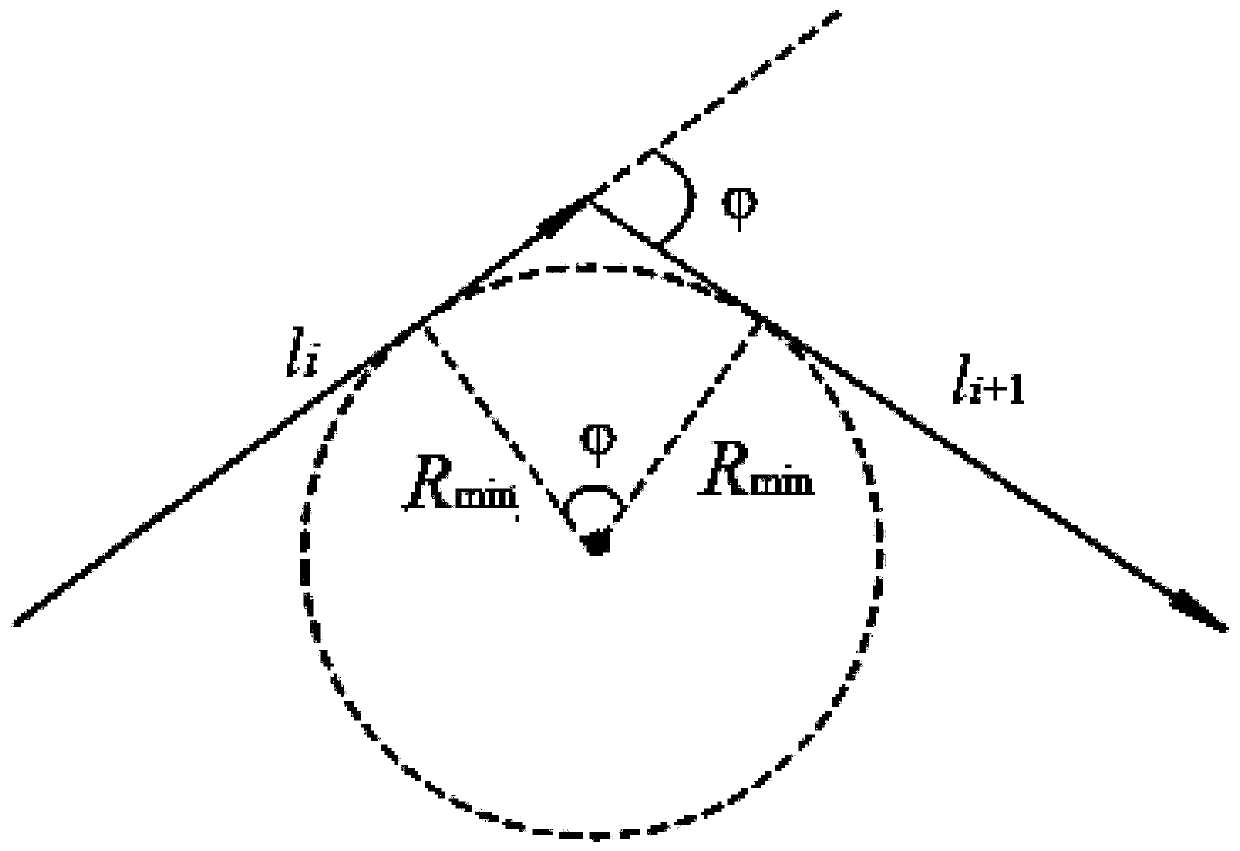
[0055] Transform the drone's minimum turning radius constraint into a maximum turning angle constraint, such as Figure 4 As shown, the turning angle between two consecutive paths is limited, so that the UAV turning angle The cosine value of is not less than the maximum turning angle The cosine value of , as shown in formula (4):
[0056]
...
specific Embodiment approach 3
[0059] Specific implementation mode three: the difference between this embodiment mode and specific implementation mode two is that the improved RRT algorithm adds the track distance constraint specifically as follows:
[0060] The maximum range constraint of UAV is improved, and the track distance constraint of UAV is introduced. The length of the UAV's track distance constraint is limited to k times the straight-line distance between the starting position and the target position; assuming that the straight-line distance from the starting position to the target position is d, the length of the track distance constraint is set to d max = k d; k ≥ 1; in this way, the track distance planned by the algorithm can be shortened, and a relatively better (shorter) path planning can be obtained.
[0061] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More