

Intelligent unmanned aerial vehicle inspection system and method of tunnel
A technology of unmanned aerial vehicles and tunnels, applied in control/adjustment systems, three-dimensional position/channel control, instruments, etc., can solve problems such as crashes, complex internal environments of tunnels, and drastic changes in magnetic fields, and achieve high work efficiency and facilitate follow-up The effect of high degree of detection and automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
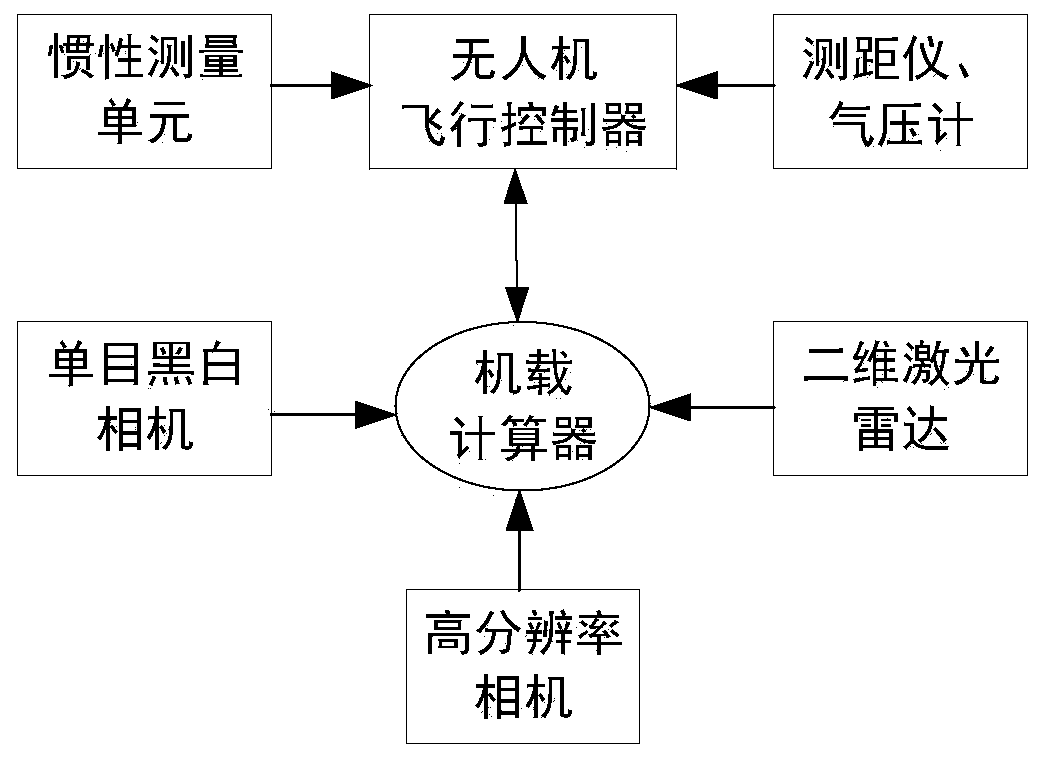
[0043] please see figure 1 , a tunnel intelligent UAV inspection system provided by the present invention, including a UAV, a flight controller, an onboard computer, an inertial measurement unit IMU, a monocular black and white camera, a high-resolution camera, and a single-point laser rangefinder , barometer, 2D lidar and lighting equipment;
[0044] The flight controller is used to control the take-off, movement and landing of the UAV;
[0045] The on-board computer, monocular black and white camera, and inertial measurement unit IMU are respectively conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More