Circular array sound source positioning visualization system and method
A sound source localization and array technology, applied in other database browsing/visualization, positioning, radio wave measurement systems, etc., can solve the problems of easy collision damage, poor practicability, complex array structure, etc., to avoid false peaks and improve accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
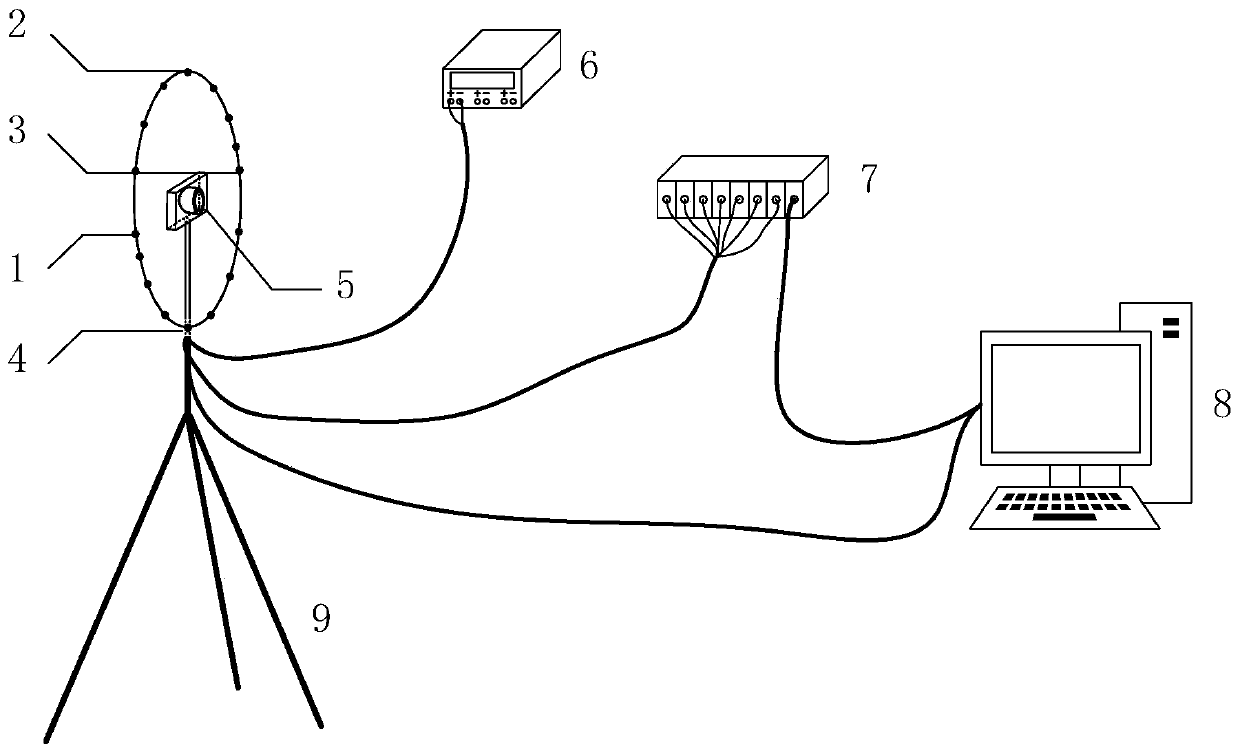
[0097] This embodiment discloses a circular array sound source localization visualization system, such as figure 1 As shown, for sound collection, visual data collection, power supply, data collection, data processing display and mechanical structure, including:
[0098] The sound collection part is composed of a microphone array, 16 microphones are evenly distributed on a circle with a radius of 20cm, and the microphones are M4261 microphones produced by NTi Company; among them, 1 is the first microphone, 2 is the fifth microphone, and 3 is the ninth microphone , 4 is the 13th microphone;
[0099] In the visual collection part, 5 is an industrial camera, the optical center of which coincides with the center of the array circle, and the optical axis points to the same direction as the pickup head of the microphone;
[0100] The power supply part, 6 is the power supply, which provides 5V DC power supply to the microphone;
[0101] In the data acquisition part, 7 is a data acq...
Embodiment 2
[0105]This embodiment discloses a sound source localization method of a circular array sound source localization visualization system, which is applied to sound data processing and calculation, including:
[0106] Obtain the sound signal received by each microphone, and perform preprocessing such as extraction, denoising, pre-emphasis, windowing, and framing;
[0107] Calculate the delay of the 5th microphone and the 13th microphone, and use the cross-correlation method to calculate the cross-correlation of the data received by the 5th microphone and the 13th microphone calculate Obtain the value of τ at the maximum value, and obtain the time difference τ;
[0108] Judging the quadrant of the sound source according to the positive or negative of the time difference τ, determine the azimuth search range, if the time difference is positive, the azimuth search range is 180°~360°, if the time difference is negative, the azimuth search range is 0°~180° ;
[0109] Calculate the...
Embodiment 3
[0120] This embodiment also discloses a sound source localization method of a circular array sound source localization visualization system, which is applied to the matching display of sound source position information in a visual scene, specifically including:
[0121] Calculate the distance l from the center of the sound source array, including:
[0122] Select the 1st microphone, the 5th microphone, the 9th microphone, and the 13th microphone, and the coordinates are A 1 (r,0,0),A 2 (0, r, 0), A 3 (-r,0,0), A 4 (0,-r,0), the time when the sound source arrives at each microphone is τ 1 , τ 2 , τ 3 , τ 4 , then the time difference between the sound source reaching the microphone is τ ij (i,j=1,2,3,4), the speed of sound is c, and the distance l between the sound source and the center of the array is calculated:
[0123]
[0124] where the time difference between the sound source reaching the microphone is τ ij (i,j=1,2,3,4), obtained by the generalized cross-corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More