

IMU full parameter error fast calibration method based on backtracking theory
A calibration method and full-parameter technology, applied in the calibration field, can solve the problems of reducing navigation efficiency, complex calibration path design, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0113] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0114] The present invention provides a fast calibration method of IMU full parameter error based on the backtracking theory, designs a calibration trajectory of positive and negative rotation at three positions, analyzes the observability of the error state through the error propagation law of the inertial component, and uses the inertial system The speed error is used as the observation data, combined with the backtracking navigation theory to establish the Kalman filter equation for error calibration, to achieve the purpose of quickly calibrating the IMU full parameter error.
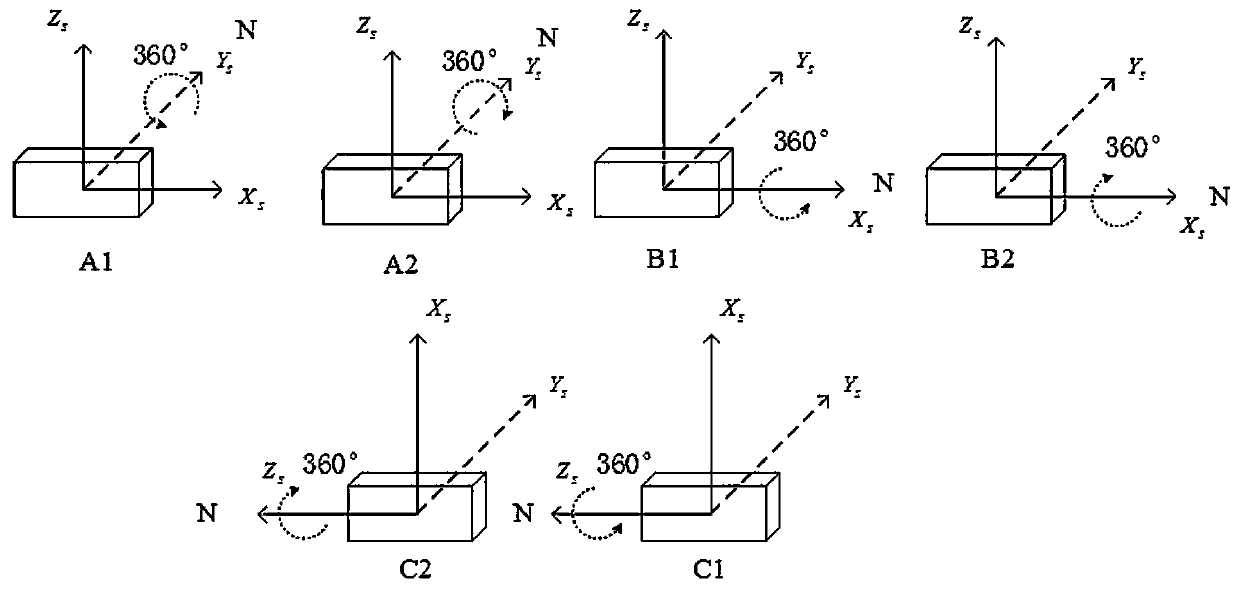
[0115] like figure 1 As shown in the schematic diagram of the turntable rotation path arrangement, the present invention designs the three-position rotation of the turntable and uses the speed error under the inertial system as the observation quantity. At the same tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More