

Item active pick-up method through mechanical arm based on deep and reinforced learning
A technology of reinforcement learning and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as picking failures, easy output of wrong values, and inability to solve effectively
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention proposes a method for actively picking up objects with a robotic arm based on deep reinforcement learning. The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
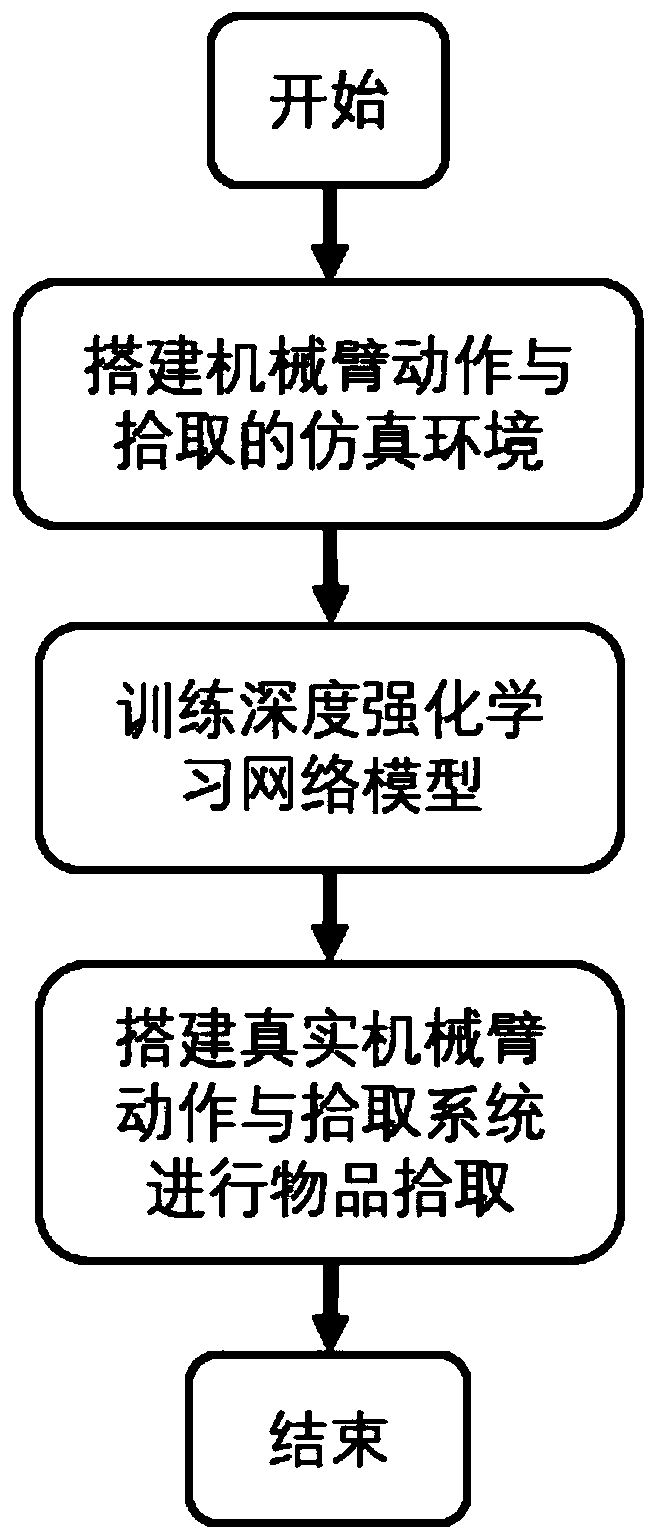
[0072] The present invention proposes a method for actively picking up objects with a robotic arm based on deep reinforcement learning. The overall process is as follows: figure 1 As shown, it specifically includes the following steps:
[0073] 1) build the simulation environment that manipulator picks up, present embodiment adopts V-REP software (Virtual RobotExperimentation Platform, virtual robot experiment platform); Concrete steps are as follows:
[0074] 1-1) Import any manipulator model that can control the movement (the manipulator model can be different from the actual manipulator) in the V-REP software as the manipulator simulation. This embodiment uses UR5 (Universal Robots 5, Universal Robots 5)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More