

A human body automatic ultrasonic scanning robot, controller and control method
A controller and robot technology, applied in program control, digital control, electrical program control, etc., can solve problems such as inability to complete curved surfaces, limited changes in spring stiffness, inability to monitor and improve stress conditions, and reduce workload and ease. painful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several modifications and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
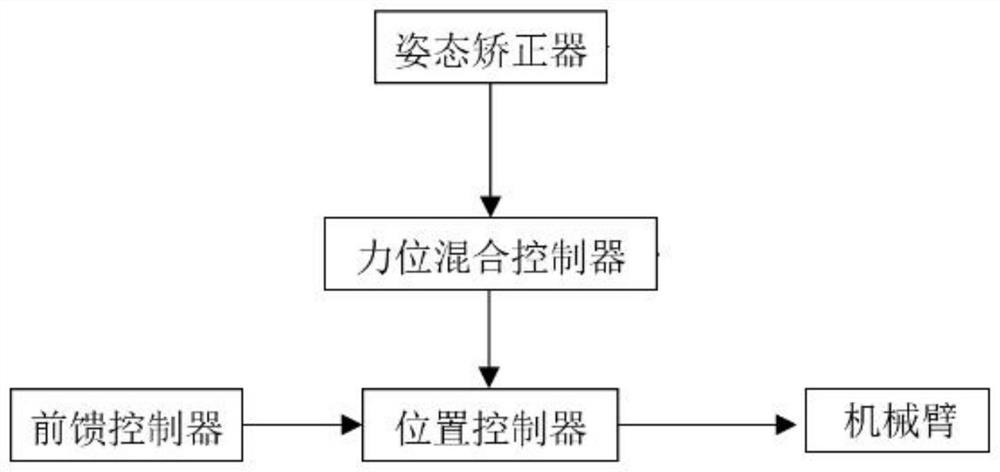
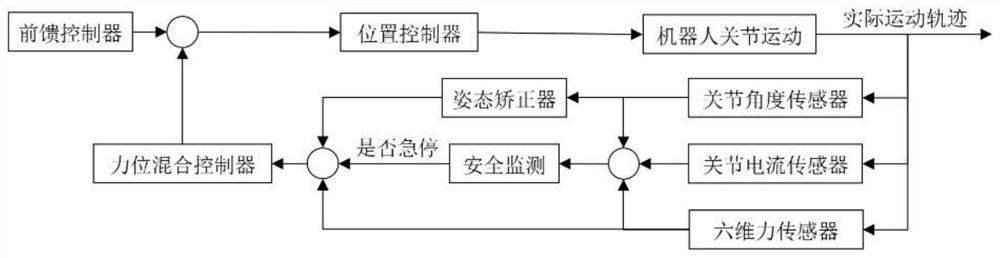
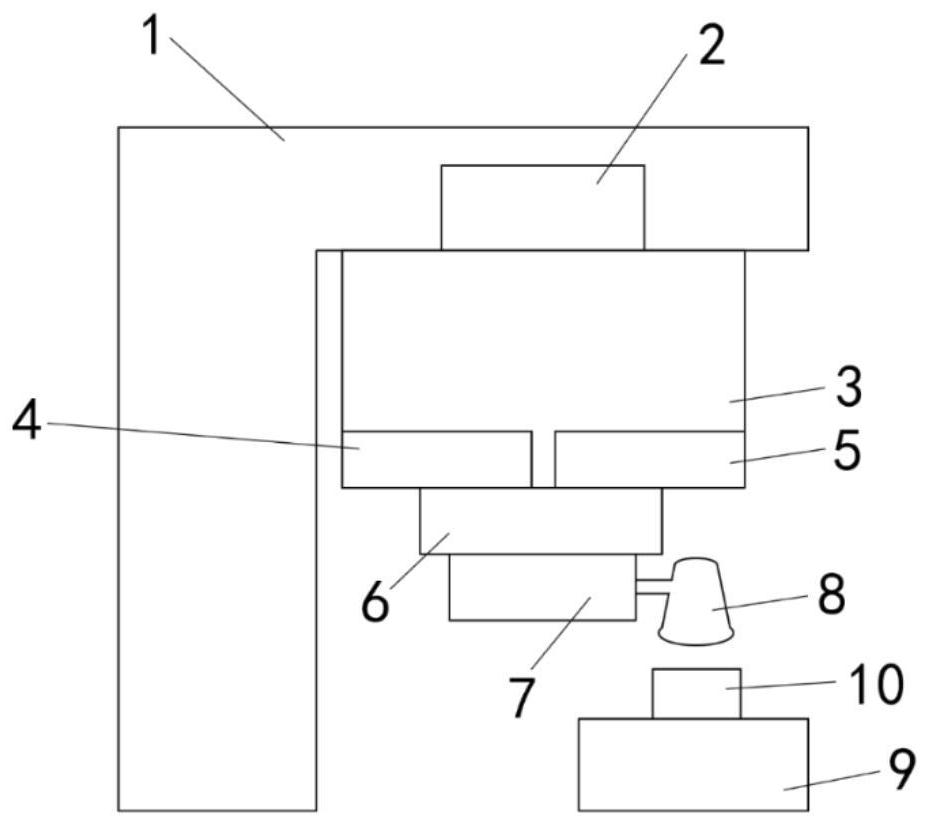
[0048] refer to Figure 1-Figure 2 As shown, it is a module block diagram of an embodiment of the controller of the present invention, and the controller is used to control the ultrasonic detection probe 8 held by the robot arm.
[0049] like figure 1 As shown, the controller 5 includes a feedforward controller, a position controller, a force-position hybrid controller and a posture corrector; wherein: the feedforward controller controls the ultrasonic detection probe 8 to move to the star...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More