

Multi-motor servo system active disturbance rejection sliding mode speed control method based on inertia identification
A servo system and speed control technology, applied in the control of motor speed or torque, motor generator control, electronic commutation motor control, etc. The effect of control precision and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
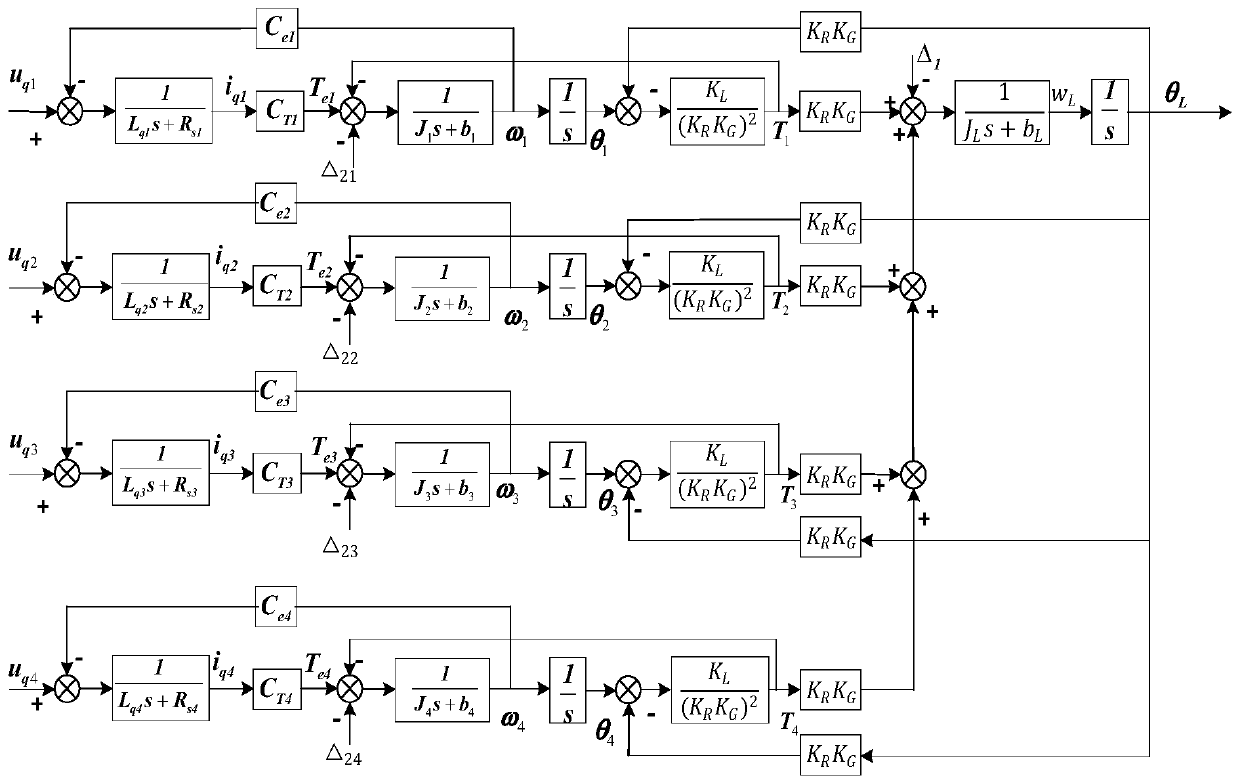
[0016] The self-disturbance rejection sliding mode speed control method of a multi-motor servo system based on inertia identification in the present invention comprises the following steps:
[0017] Step 1. Construct the dynamic equation of the multi-motor servo system;
[0018] Step 2, using the model reference adaptive method to identify the load inertia input by the multi-motor servo system;
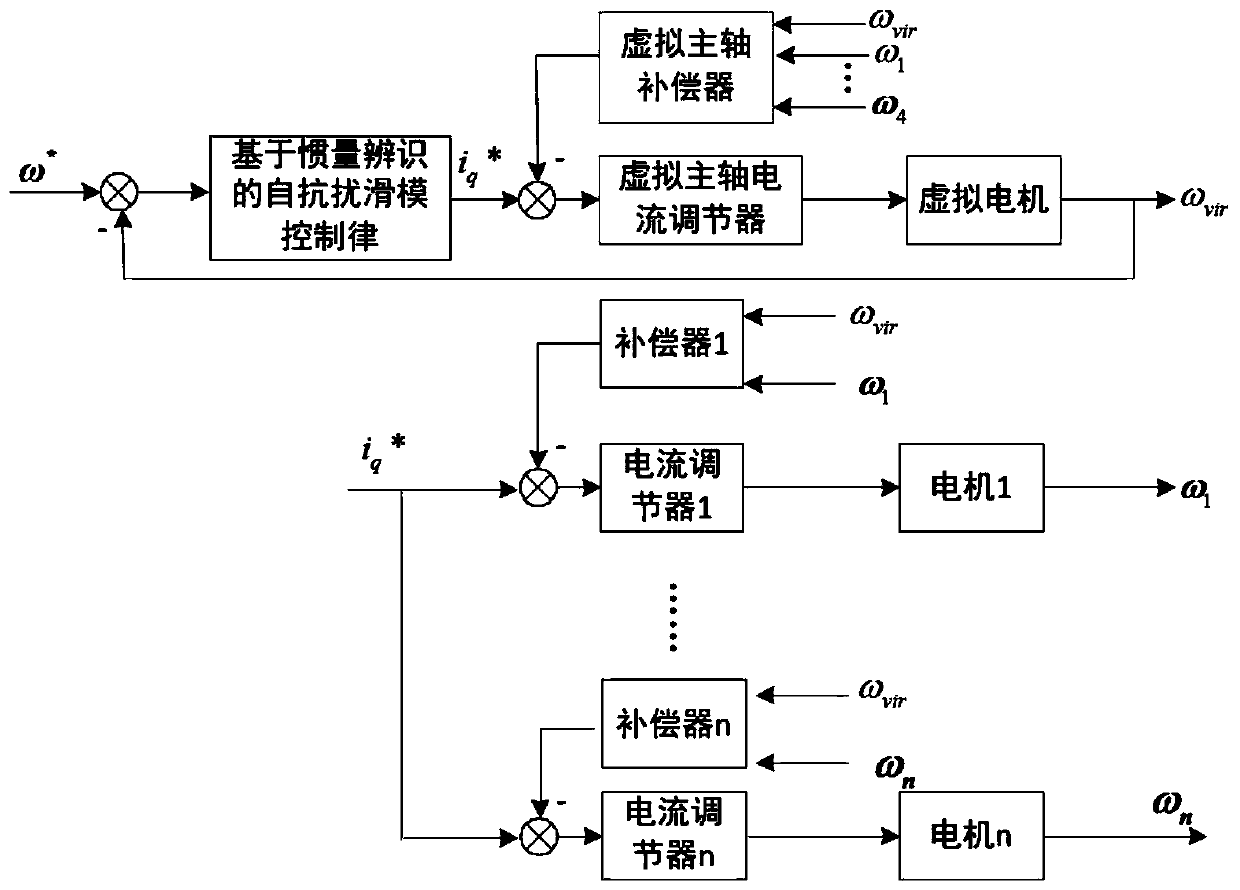
[0019] Step 3. For the variable inertia multi-motor servo system, construct the first-order ADR model according to the first-order tracking differentiator, the second-order extended state observer and the disturbance in the speed loop of the multi-motor servo system, and obtain the first-order ADR model The nonlinear state error feedback control law of ;
[0020] Step 4. Based on the hyperbolic tangent softening switching function to improve the approach law, construct a sliding mode control with integral to compensate and optimize the nonlinear state error feedback control law of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More