

A tactile-sensing human-like hand based on nut-screw and tendon transmission
A technology of tactile perception and imitation of human hands, which is applied in the field of tactile perception and imitation of human hands, can solve the problems of large size and weight, difficult closure and geometric closure, high cost, etc., to improve feasibility and reliability, precise movement angle changes, types and The effect of widening the range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in conjunction with the accompanying drawings and specific examples:
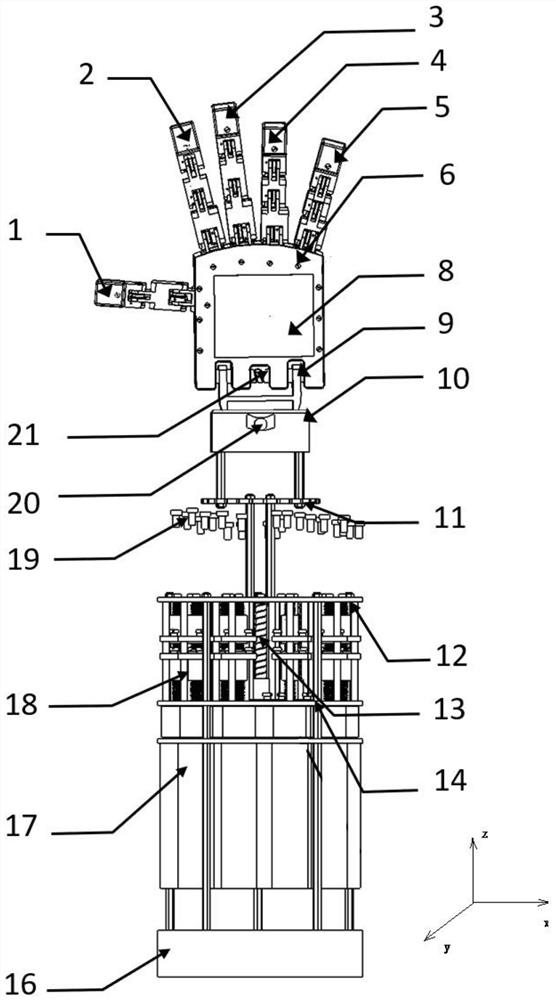
[0029] The present invention provides a tactile sensor-like manner based on a nut screw and tendon transmission, which has a five finger structure, which can grab different shapes and volume of objects. At the same time, there is a tactile sensor, and can measure the transient contact force size, feedback pressure signal, change, and transfer rotary electric output forces and output moments, improve the operation of the smart hand. Sexuality and adaptability.
[0030] Such as figure 1Due to the integration of tactile sensation, the manual schematic, known by the figure, the tactile sensation of the human hand includes thumb 1, index 2, middle finger 3, no name index 4, small finger 5, palm board 6, palm tactile sensor 8, wrist 9, wrist bracket 10, Subline disc 11, slave plate 12, nut screw mechanism group 13, screw down 14, base 16, rotary electric unit 17,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More