

Strapdown inertial navigation system (SINS) swinging base self-aligning method based on Lie group optimal estimation
A strapdown inertial navigation and optimal estimation technology, applied in the direction of measuring devices, instruments, etc., can solve problems such as shortening the alignment time and failing to guarantee the orthogonality of the rotation matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
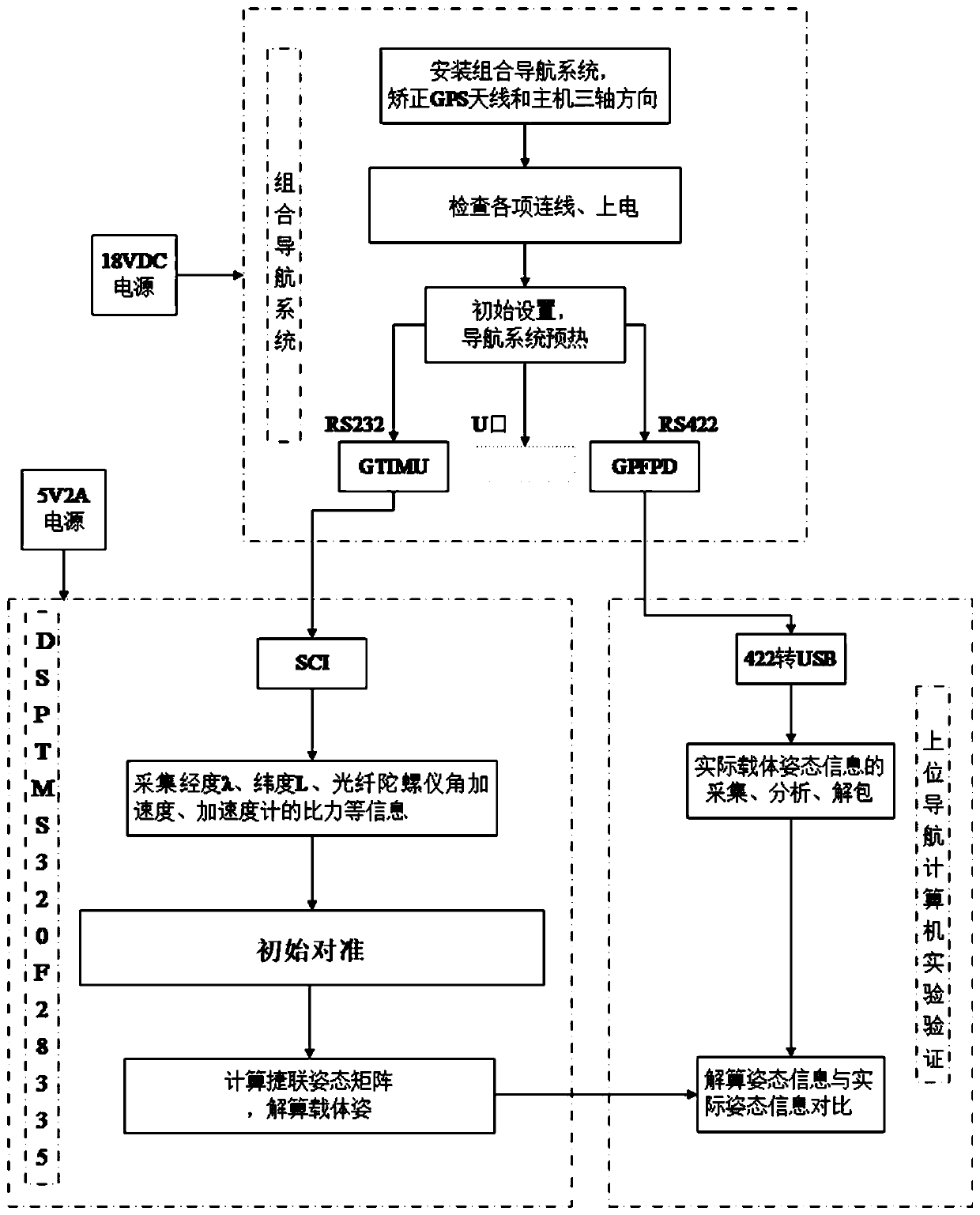
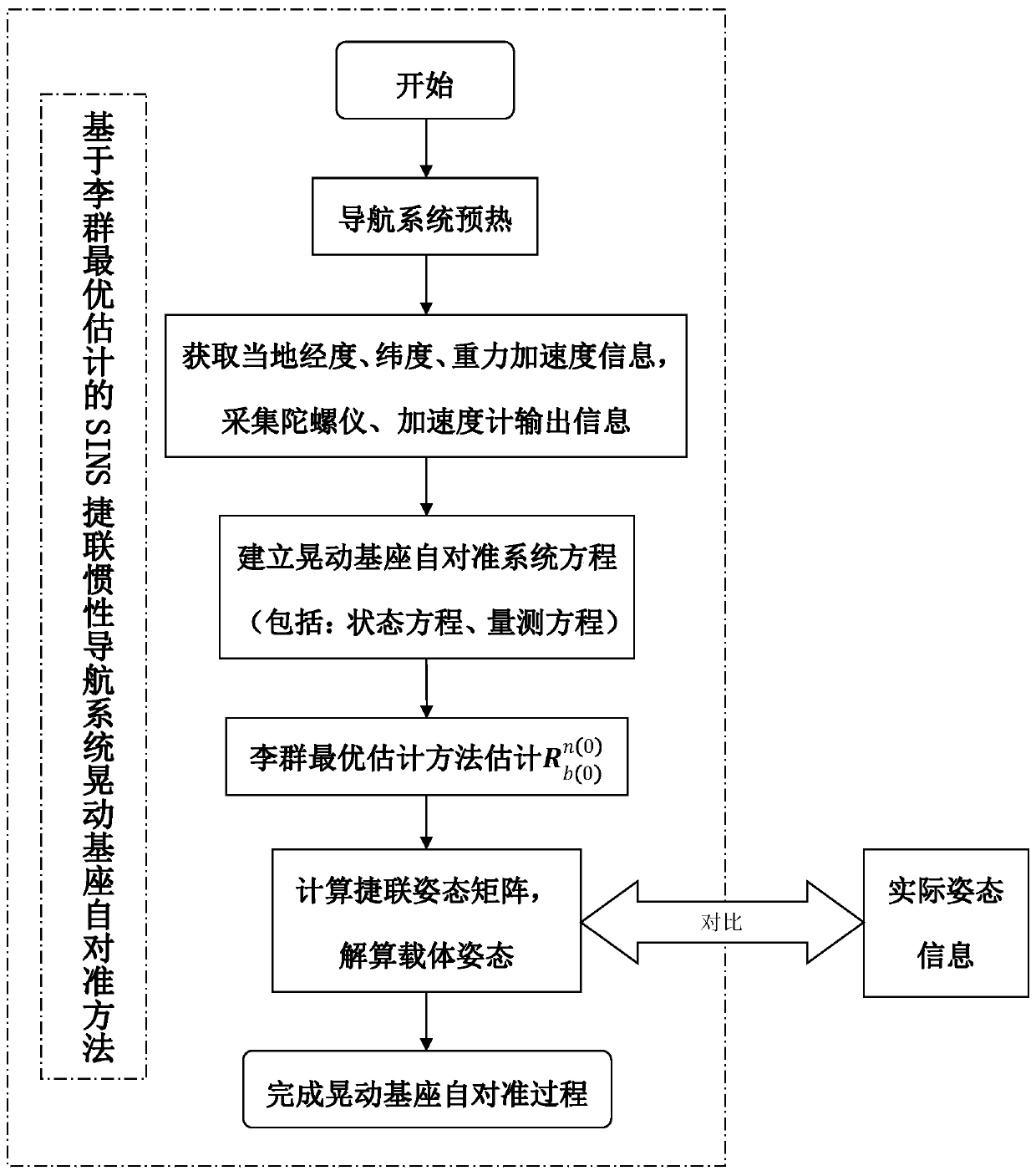
[0091] The present invention is based on the design of the SINS strapdown inertial navigation system shaking base self-alignment method based on Lie group optimal estimation. The specific implementation steps of the present invention will be described in detail below in conjunction with the system flow chart of the present invention:
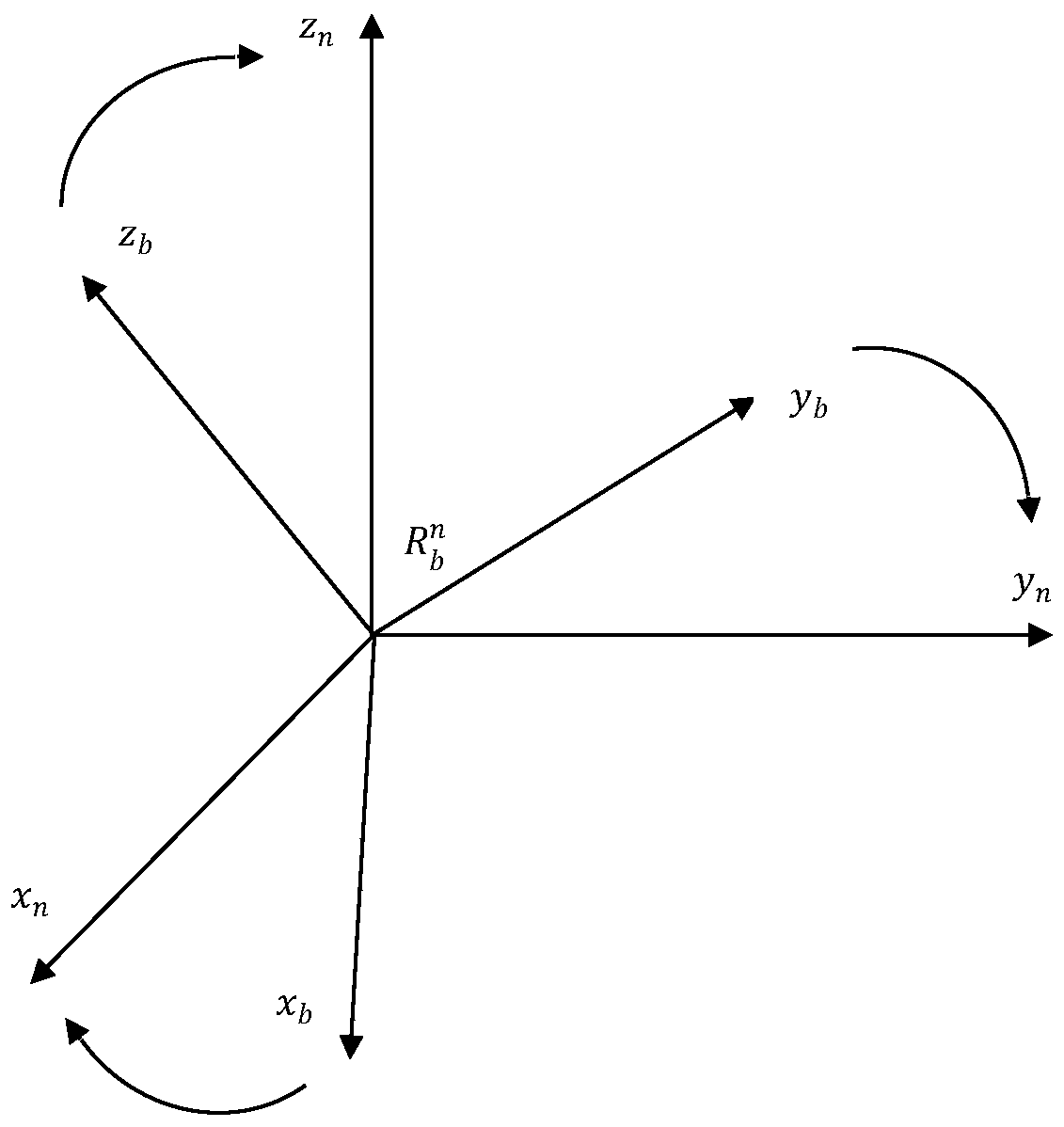
[0092] The SINS strapdown inertial navigation system shaking base self-alignment method based on Lie group optimal estimation provided by the present invention first obtains real-time data from sensors; processes the collected data, and establishes a description based on Lie group based on Lie group differential equations. The linear self-aligning system model; use the Lie group optimal estimation algorithm to estimate the initial attitude matrix based on the Lie group description and solve for the pose matrix During self-alignment, after multiple estimation and solving, the accurate initial pose matrix is finally obtained and pose matrix ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More