

Aggressive aided driving curve obstacle avoidance lane changing path planning system and method
A technology for assisted driving and path planning, applied in the field of assisted driving, which can solve the problems of scaring vehicles behind, reducing vehicle traffic efficiency, and traffic accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further explained below in conjunction with the accompanying drawings.
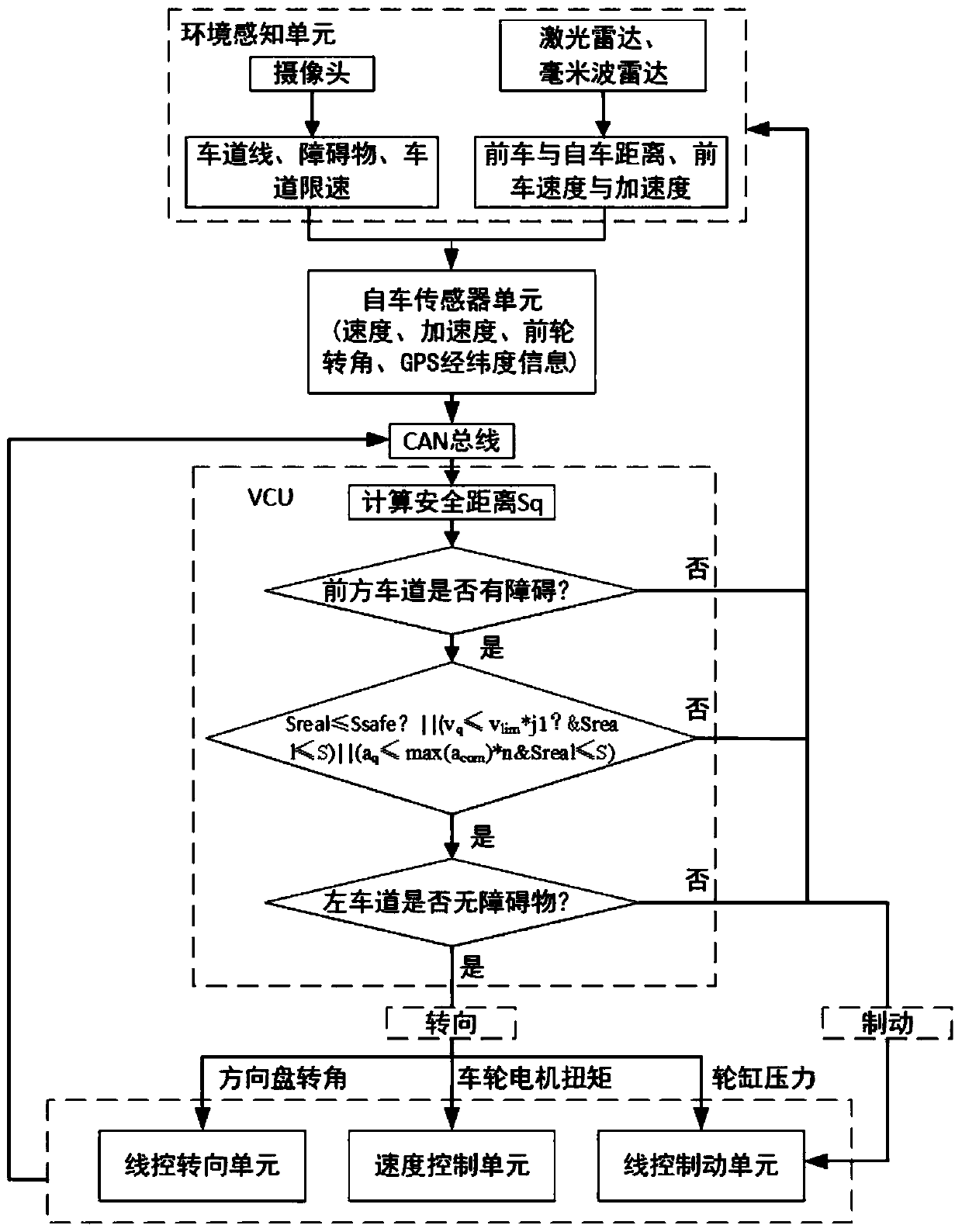
[0063] like figure 1 Shown is the logic block diagram of the system, which is divided into seven parts, environment perception unit, ego sensor unit, CAN bus, VCU, steering-by-wire unit, brake-by-wire unit, and speed control unit. The following is a specific explanation of the block diagram process:
[0064] The environment perception unit includes a camera, laser radar and millimeter wave radar; the vehicle sensor unit includes a vehicle speed sensor, an acceleration sensor, and a front wheel angle sensor; the camera is installed directly above the vehicle windshield for identifying lane lines Information, obstacle information, lane speed limit, and the image information is transmitted to the VCU; the number of the laser radars is at least 2 (to ensure the safety of front-end detection and prevent danger caused by a single radar failure), which are respectively insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More