

High-integrity bone surgery robot
A highly integrated technology for orthopedic surgery, applied in the field of medical devices, can solve problems such as low execution efficiency and difficult operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
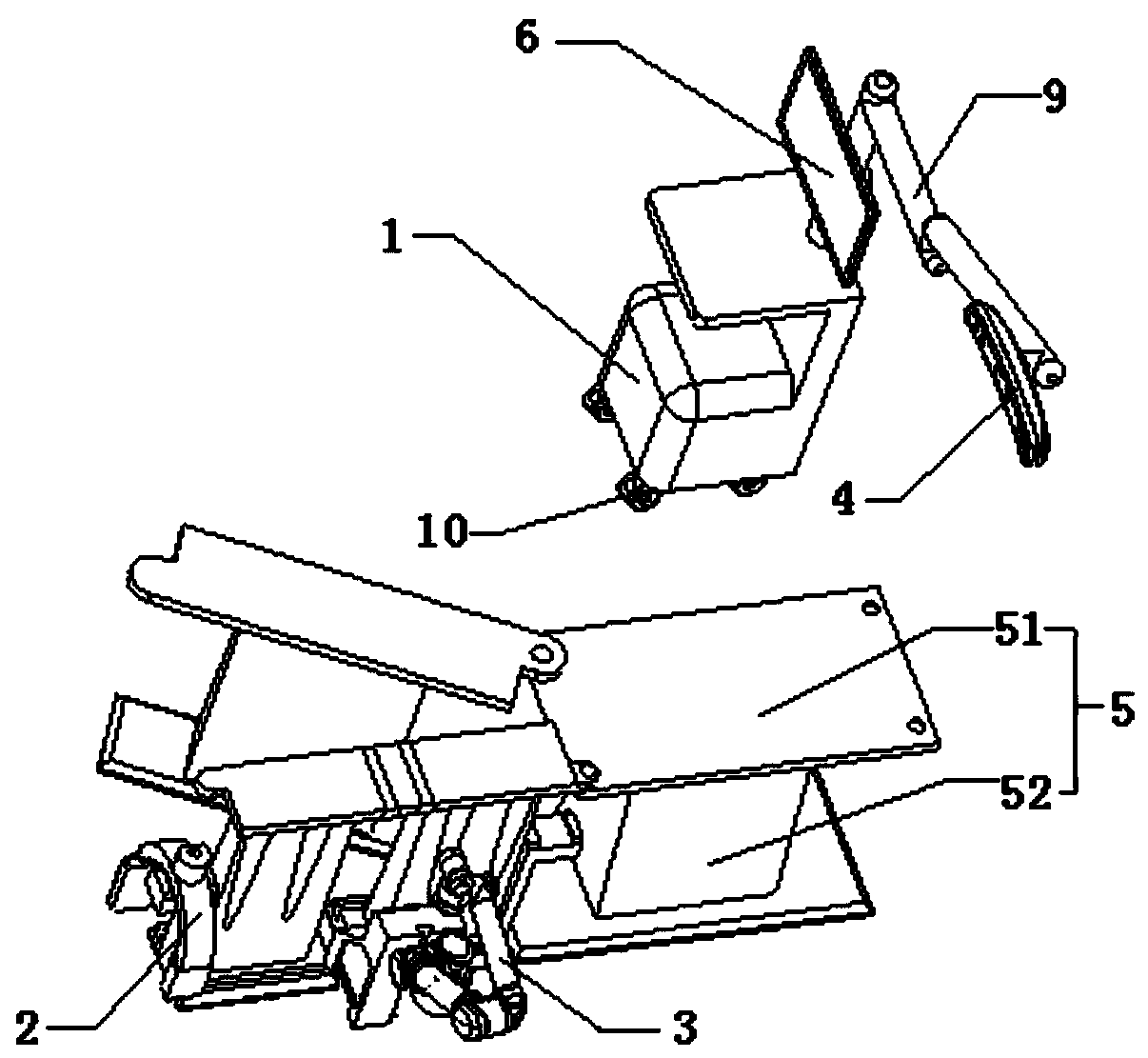
[0047] Such as figure 1 As shown, this embodiment provides a highly integrated orthopedic surgical robot, which includes a robot body 1, an imaging device 2, an actuator 3, a monitoring device 4, an operating bed 5, a control system and a display screen 6, wherein the display screen 6 Installed on the robot body 1, the control system is arranged inside the robot body 1, and the display screen 6 is connected with the control system circuit.
[0048]In this embodiment, the imaging device 2 is connected with the control system circuit, and is used for scanning the patient on the operating bed 5 and sending the scanned image to the control system. The imaging device 2 is a mobile X-ray machine, which is used for two-dimensional and three-dimensional image scanning of the patient, and the control system controls the actuator 3 to perform surgical operations on the patient according to the scanned image.
[0049] Specifically, the monitoring device 4 is connected to the control sys...
Embodiment 2
[0066] This embodiment provides another highly integrated orthopedic surgical robot, and the same parts as those in Embodiment 1 will not be repeated here, and only the different parts will be introduced below.
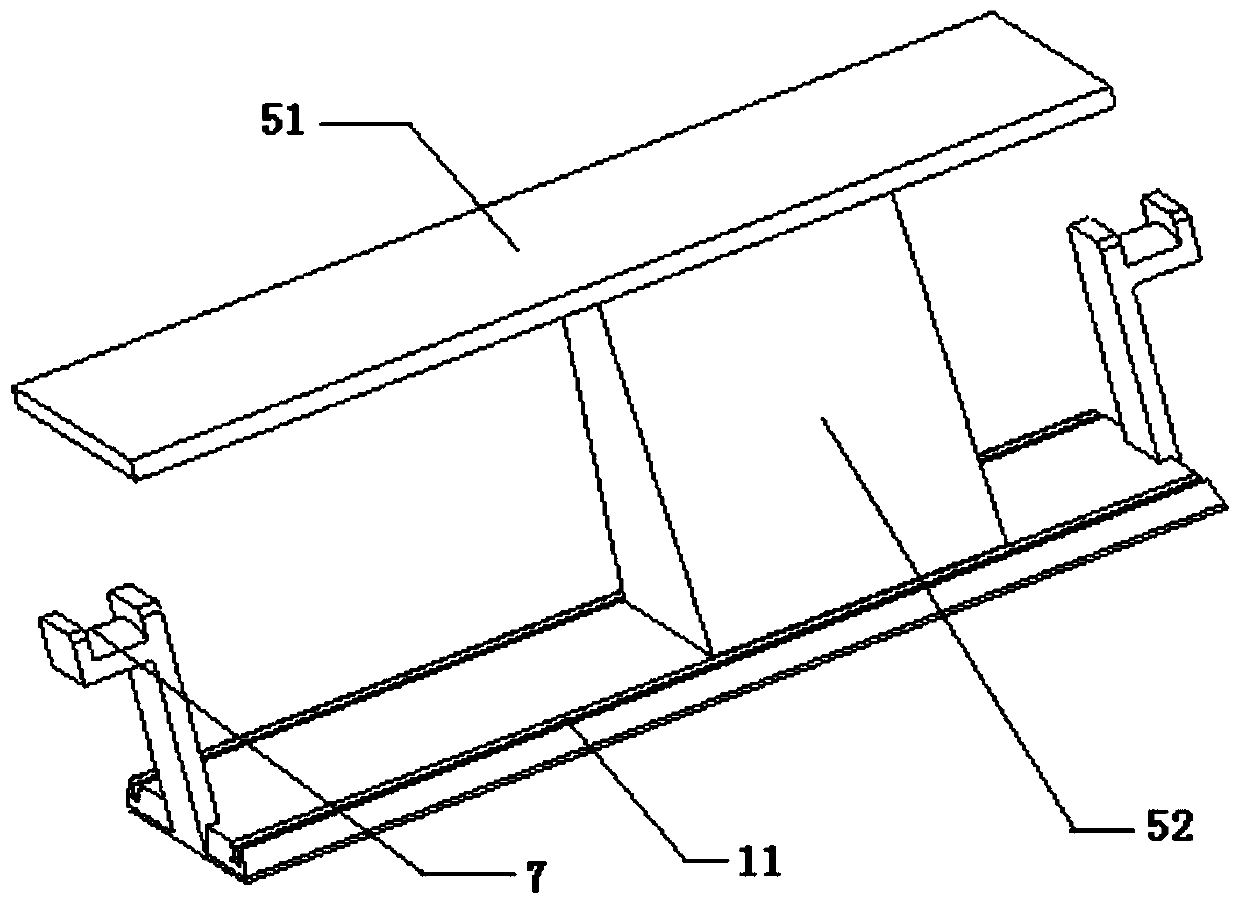
[0067] refer to Figure 1 to Figure 5 , in this embodiment, the operating bed 5 includes a bed body 51 and a support frame 52, the bed body 51 is fixed on the top of the support frame 52, and the left and right sides of the bottom of the support frame 52 are respectively provided with mounting brackets for the actuator 3. The track 11 is convenient for the actuator 3 to move.
[0068] It should be noted that the operating bed 5 is a very important part of orthopedic surgery. This embodiment only needs to introduce the split type. The split type operating bed 5 is mainly used for lower limb related operations, including but not limited to ankle joints and knee joints. , tibia, fibula, femur and other parts of the operation.
[0069] Such as Image 6 with Figure 7 ...
Embodiment 3
[0077] This embodiment provides another highly integrated orthopedic surgical robot, and the same parts as those in Embodiment 1 will not be repeated here, and only the different parts will be introduced below.
[0078] Such as Figure 8 As shown, the multi-degree-of-freedom bracket 8 is installed on the operating bed 5, and the multi-degree-of-freedom bracket 8 is slidingly connected to the operating bed 5, and the multi-degree-of-freedom bracket 8 is connected to the control system circuit.
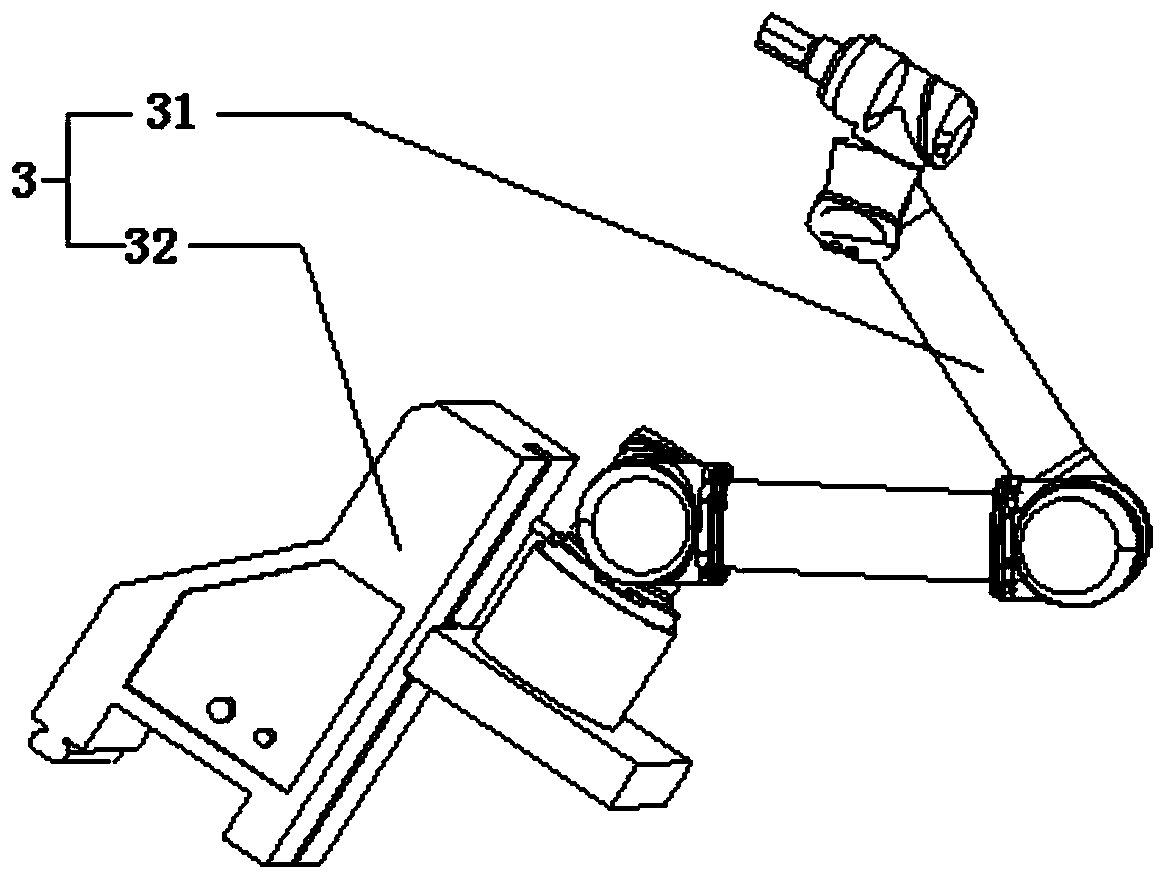
[0079] In this embodiment, the imaging device 2 is a large C-arm X-ray machine, and the C-arm X-ray machine is installed on the multi-degree-of-freedom support 8; the multi-degree-of-freedom support 8 drives the imaging device 2 to move to the operating room under the control of the control system area to scan the patient. The structure and function of the multi-degree-of-freedom support 8 are similar to the multi-degree-of-freedom mechanical arm 31, which is used to bring the C-arm X-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More