

Track center line automatic detection method based on vehicle-mounted mobile laser point cloud
A laser point cloud and orbit centerline technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problem of orbit misclassification, waste computer computing time, etc., and achieve the effect of improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
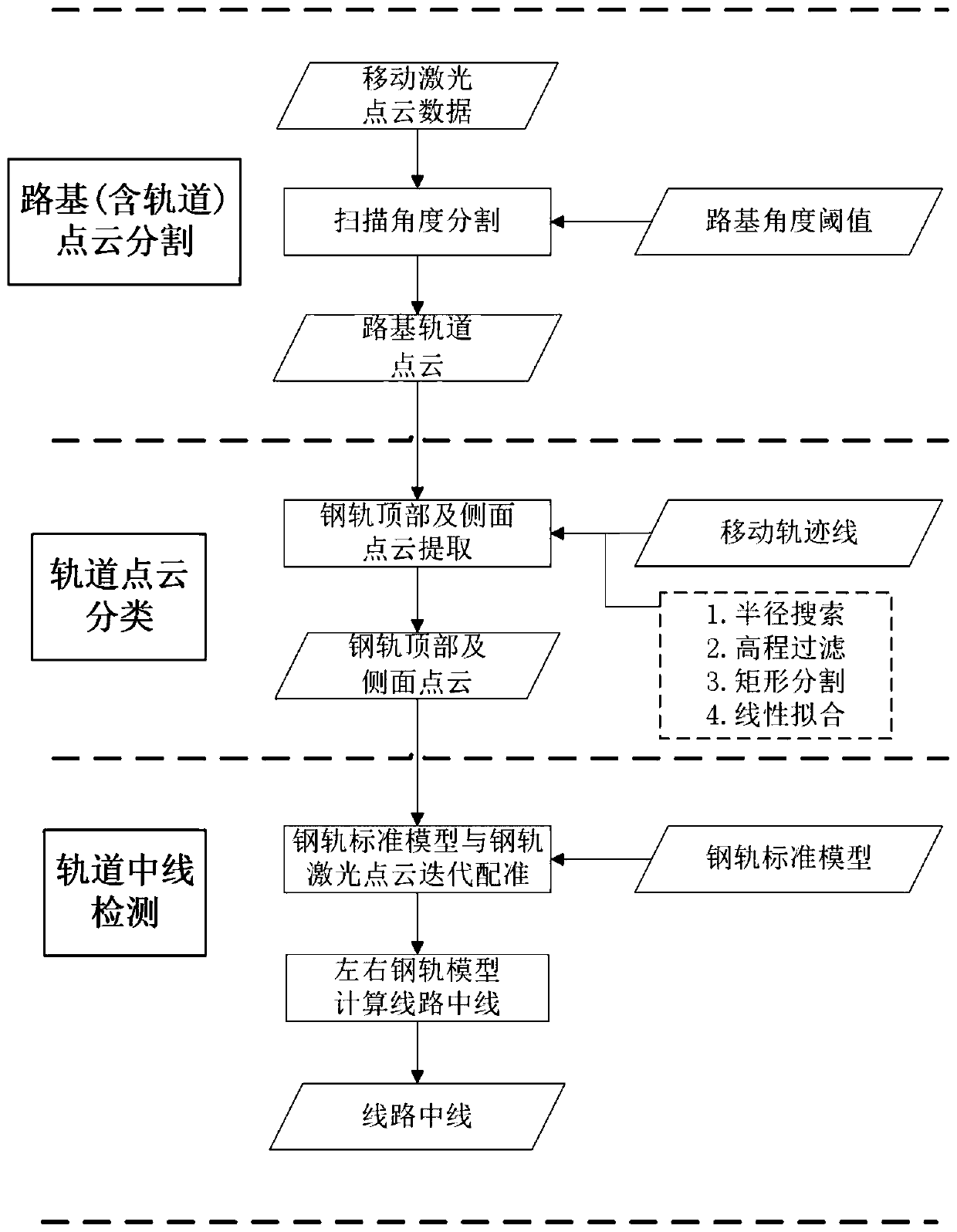
[0138] Step 1: Subgrade (including track) point cloud segmentation
[0139] In order to verify the correctness of the method of the present invention, the RIEGL VMX-450Rail system is used for data acquisition. The system mainly consists of the following parts: 1) Two full-band VQ-450 laser scanning heads; 2) 4 high-resolution industrial cameras; 3) POSPAC LV510GNSS / IMU positioning and attitude determination system.
[0140] The system is mounted on top of a car, which is then secured to the rear of the train's flatbed, allowing laser scanners to acquire data on the lower track. The scanning accuracy is about 8mm, the maximum effective measurement rate is about 1.1 million points per second, and the point density on the rail transit subgrade at the bottom of the scanner is about 1200 points / square meter. The original scanning point cloud is as follows: Figure 7 shown.
[0141] In order to evaluate the reliability and precision of the method, the scanning experiment was carri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More