

Eight-degree-of-freedom local force feedback bionic upper limb exoskeleton master manipulator
A degree of freedom and force feedback technology, applied in the direction of passive exercise equipment, physical therapy, etc., can solve the problems of heavy burden on the human body, fixed use only, large structural size, etc., and achieve the effect of intuitive control and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings.
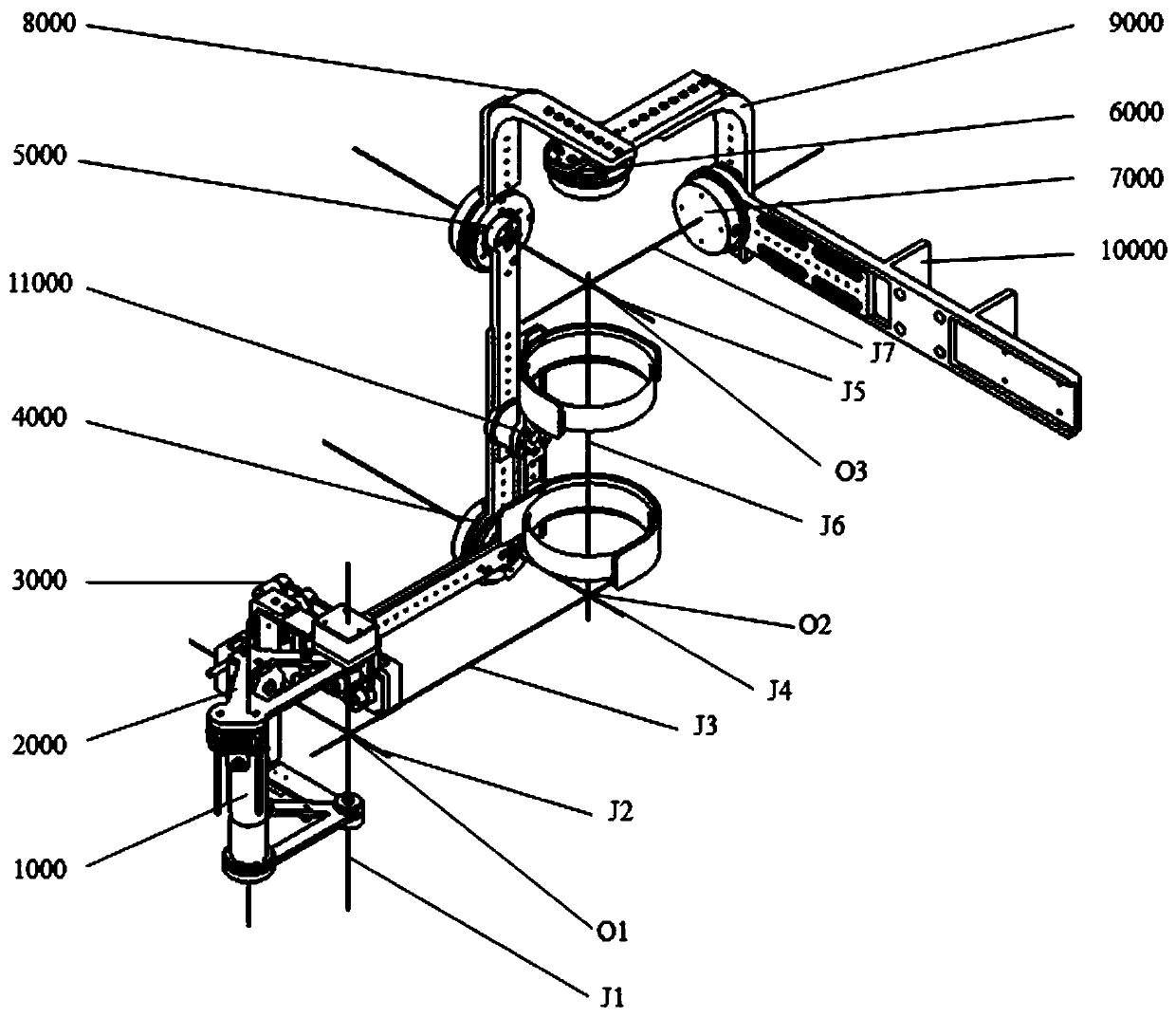
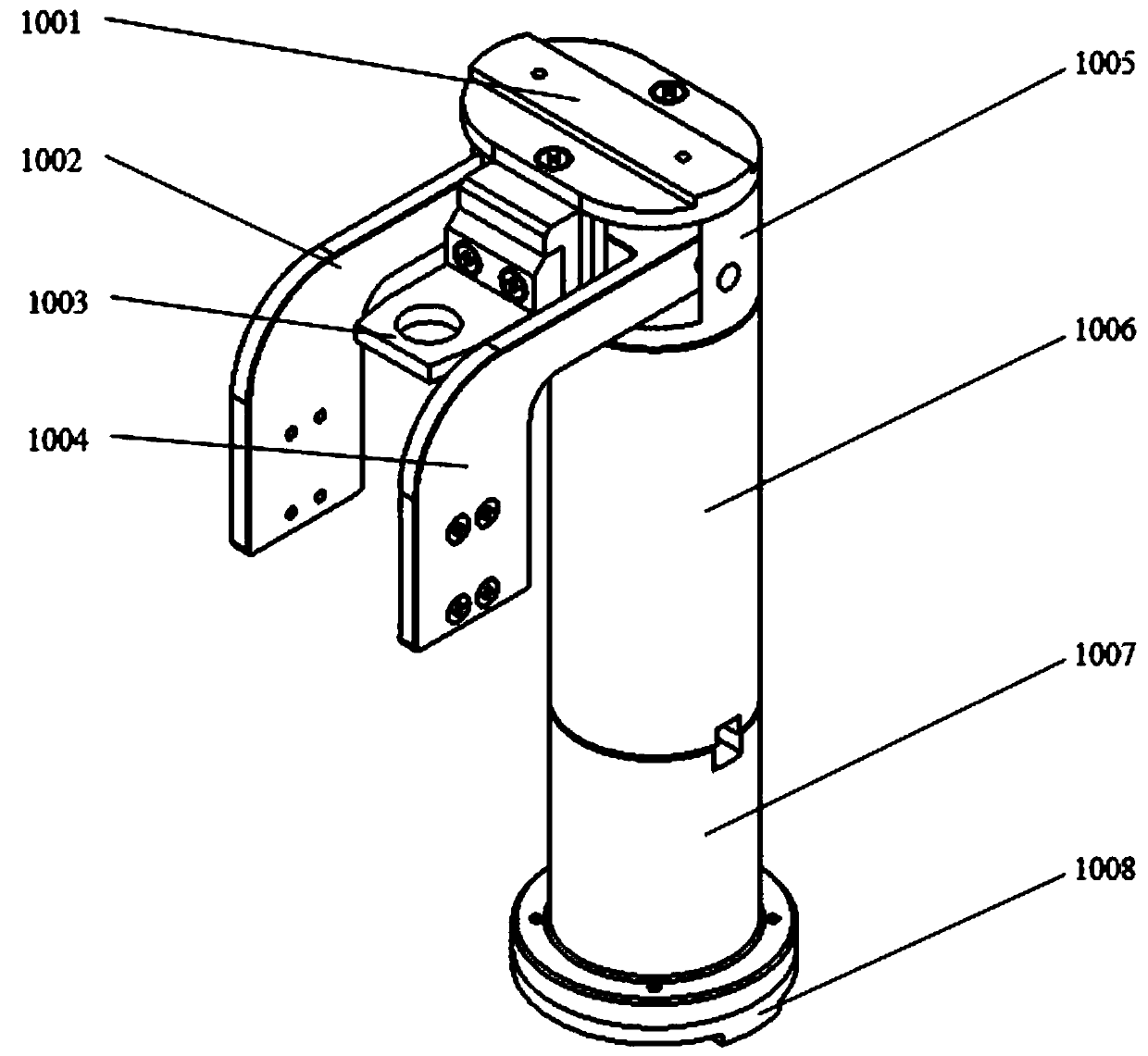
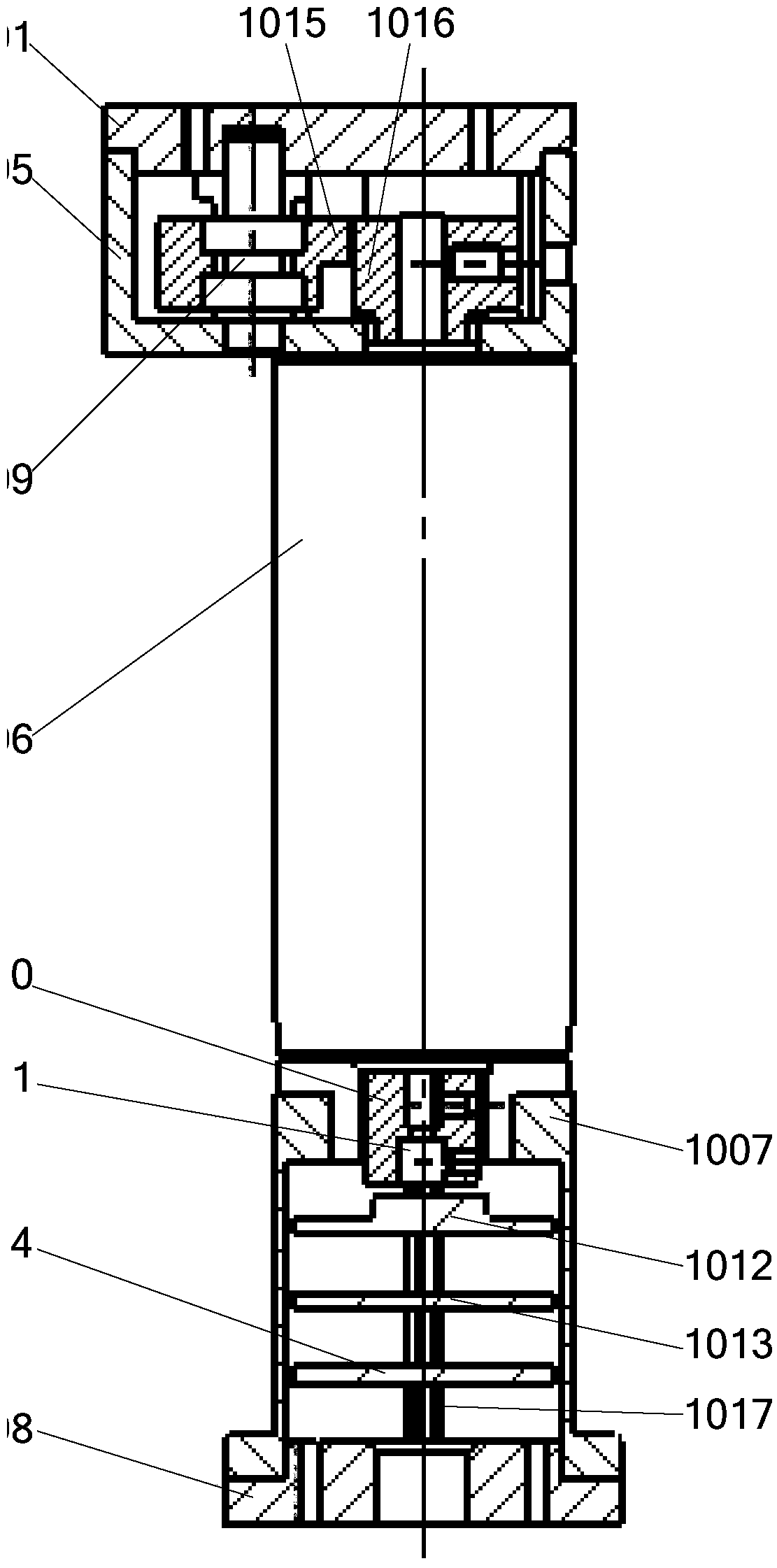
[0036] Such as figure 1 As shown, the present invention includes a free force feedback hand assembly 1000, a two-degree-of-freedom wrist joint assembly 2000, a one-degree-of-freedom forearm rotation assembly 3000, a one-degree-of-freedom elbow joint assembly 4000, a one-degree-of-freedom shoulder flexion-extension assembly 5000, a 6000 degrees of freedom shoulder rotation assembly, 7000 degrees of freedom shoulder abduction and adduction assembly, shoulder adjustment plate A8000, shoulder adjustment plate B9000, back adjustment plate 10000 and upper arm strap assembly 11000, of which two degrees of freedom wrist joint Assembly 2000 includes volar flexion and dorsiflexion joint assembly 2010 and ulnar flexion and flexion joint assembly 2020 that are rotatably connected. A free force feedback hand assembly 1000 is installed on palmar and dorsiflexion joint asse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More