

Neural-network-based adaptive finite time command filtering backstepping control method
A finite time, neural network technology, applied in the field of adaptive finite time command filtering backstepping control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0157] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
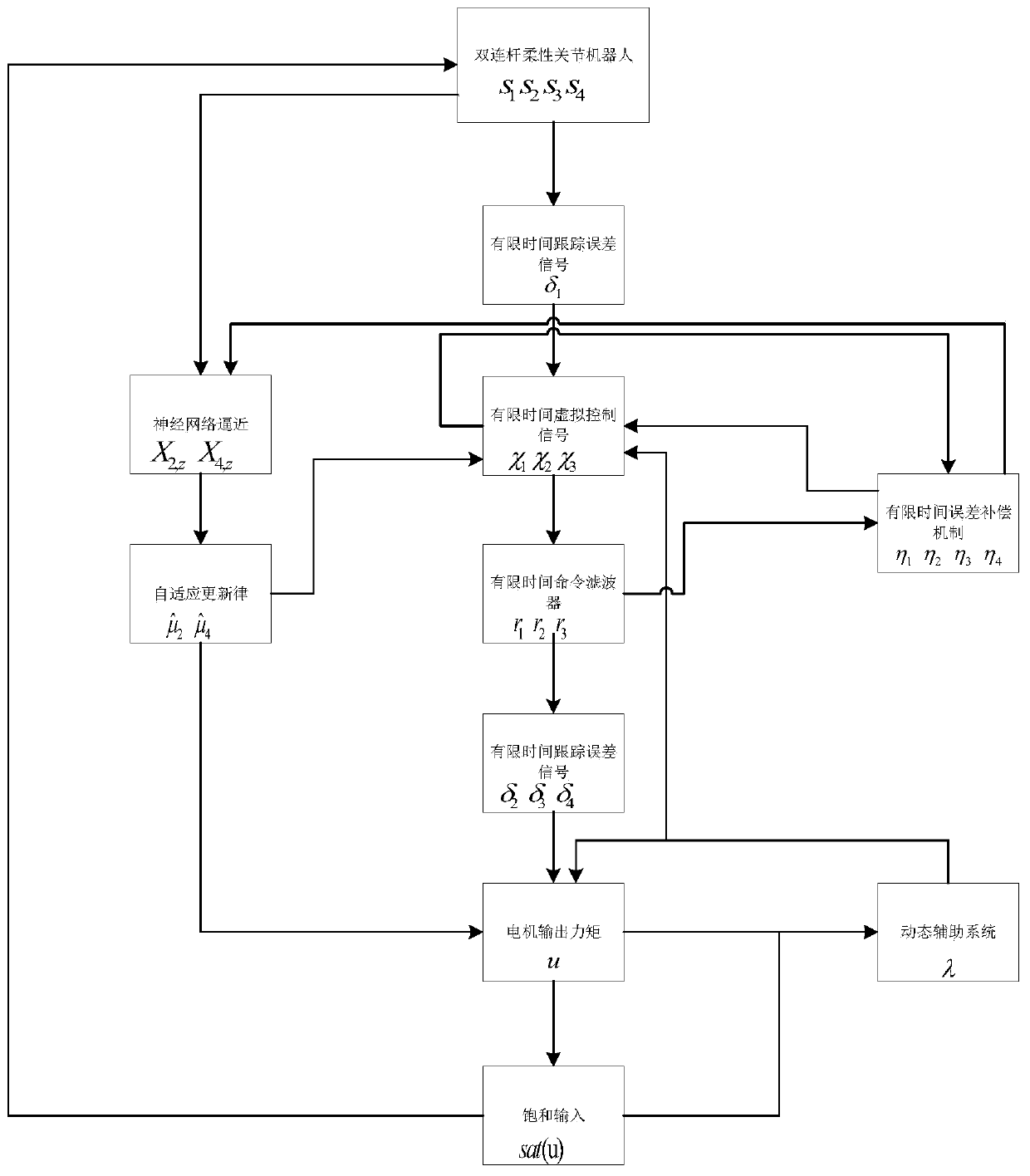
[0158] Such as figure 1 As shown, the present invention describes a neural network-based adaptive finite-time command filter backstepping control method to solve the problem of joint position tracking control of a flexible joint manipulator system with uncertainty and input saturation.
[0159] This control method comprises the steps:
[0160] The dynamic model defining the flexible joint manipulator is as follows:
[0161]
[0162] in, represent the joint position, velocity and angular velocity vectors respectively; H(q)∈R n×n is a symmetric positive definite inertia matrix; is the Coriolis centripetal matrix; G(q)∈R n is the gravity vector; F∈R n×n is the diagonal positive definite matrix of the damping friction coefficient; Respectively represent the joint position, velocity and angular velocity vector of the motor after passing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More