Method for high-energy efficiency control over inlet and outlet electro-hydraulic position independent regulation servo system based on proportional overflow valve
An electro-hydraulic position servo, proportional relief valve technology, applied in servo motors, servo meter circuits, servo motor components, etc., can solve the problems of low pressure loss and heat generation, low energy efficiency of electro-hydraulic valve-controlled servo systems, etc. The effect of pressure loss, improving energy utilization efficiency and reducing overflow loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings by taking the actuator impedance extension working condition as an example.
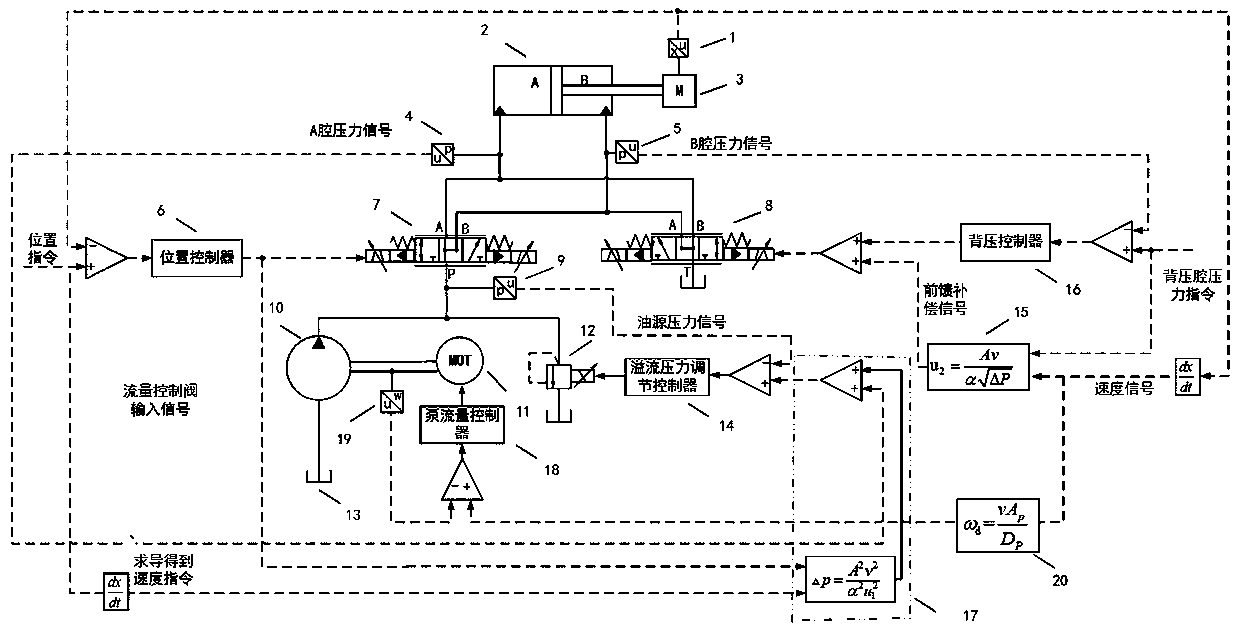
[0023] As shown in the figure, the electro-hydraulic position servo system based on proportional relief valve independent adjustment of the inlet and outlet in the embodiment of the present invention includes a displacement sensor 1, a hydraulic actuator 2, a load 3, a first pressure sensor 4, and a second pressure sensor 5. Position controller 6, first servo valve 7, second servo valve 8, oil source pressure sensor 9, quantitative pump 10, servo motor 11, proportional overflow valve 12, oil tank 13, overflow pressure regulation controller 14, Feedforward compensator 15 , back pressure controller 16 , overflow pressure command planner 17 , pump flow controller 18 , angular velocity sensor 19 , speed command planner 20 . Wherein the servo motor 11 is connected with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More