

Filtering combined laser SLAM mapping method and device
A combination of laser and map information technology, applied in the field of intelligent robots, can solve the problems of mobile robots that are difficult to efficiently and accurately locate and map, the application range is limited, and the calculation efficiency is low, so as to improve real-time operation efficiency and improve accuracy. The effect of high performance and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
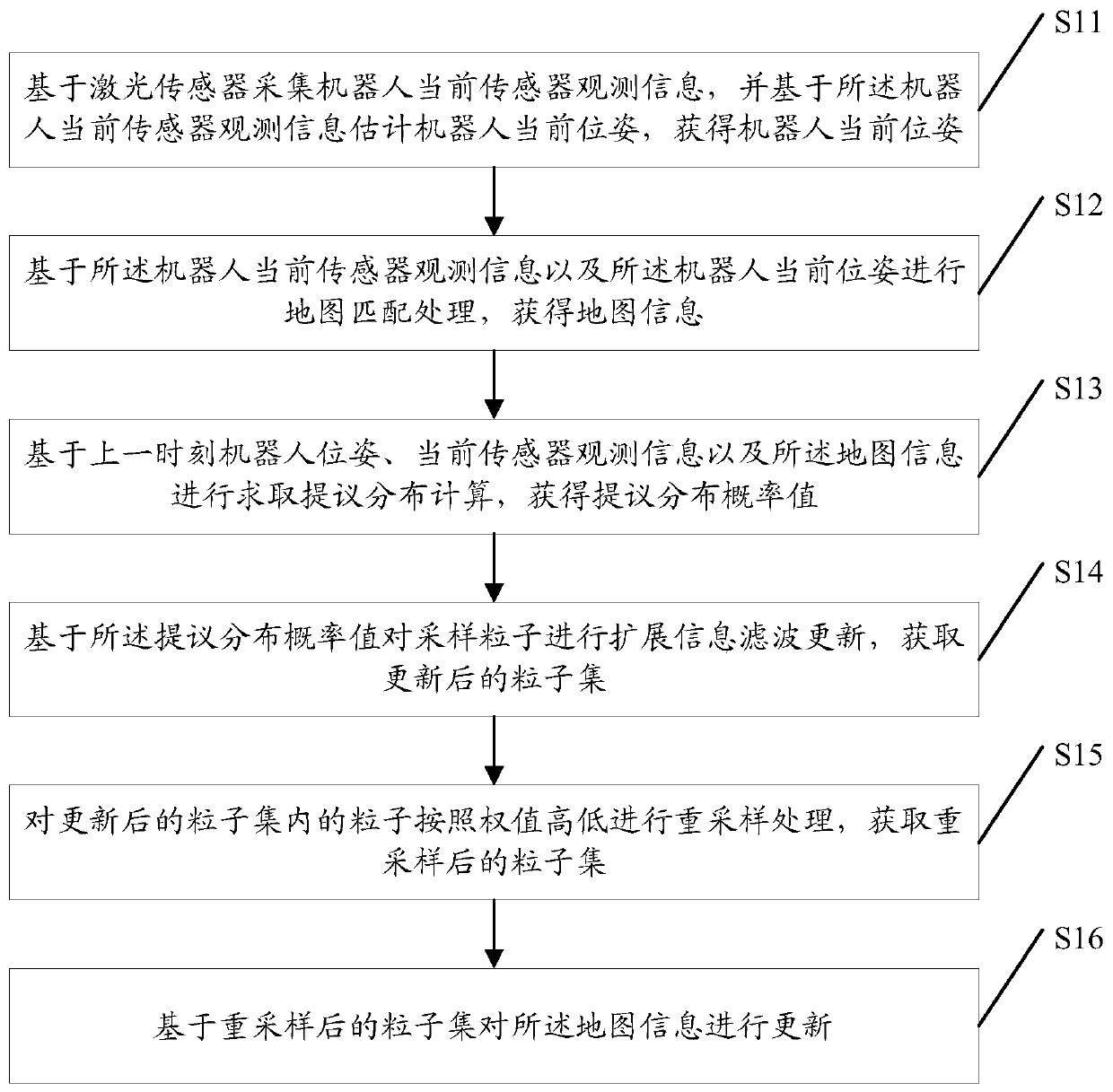
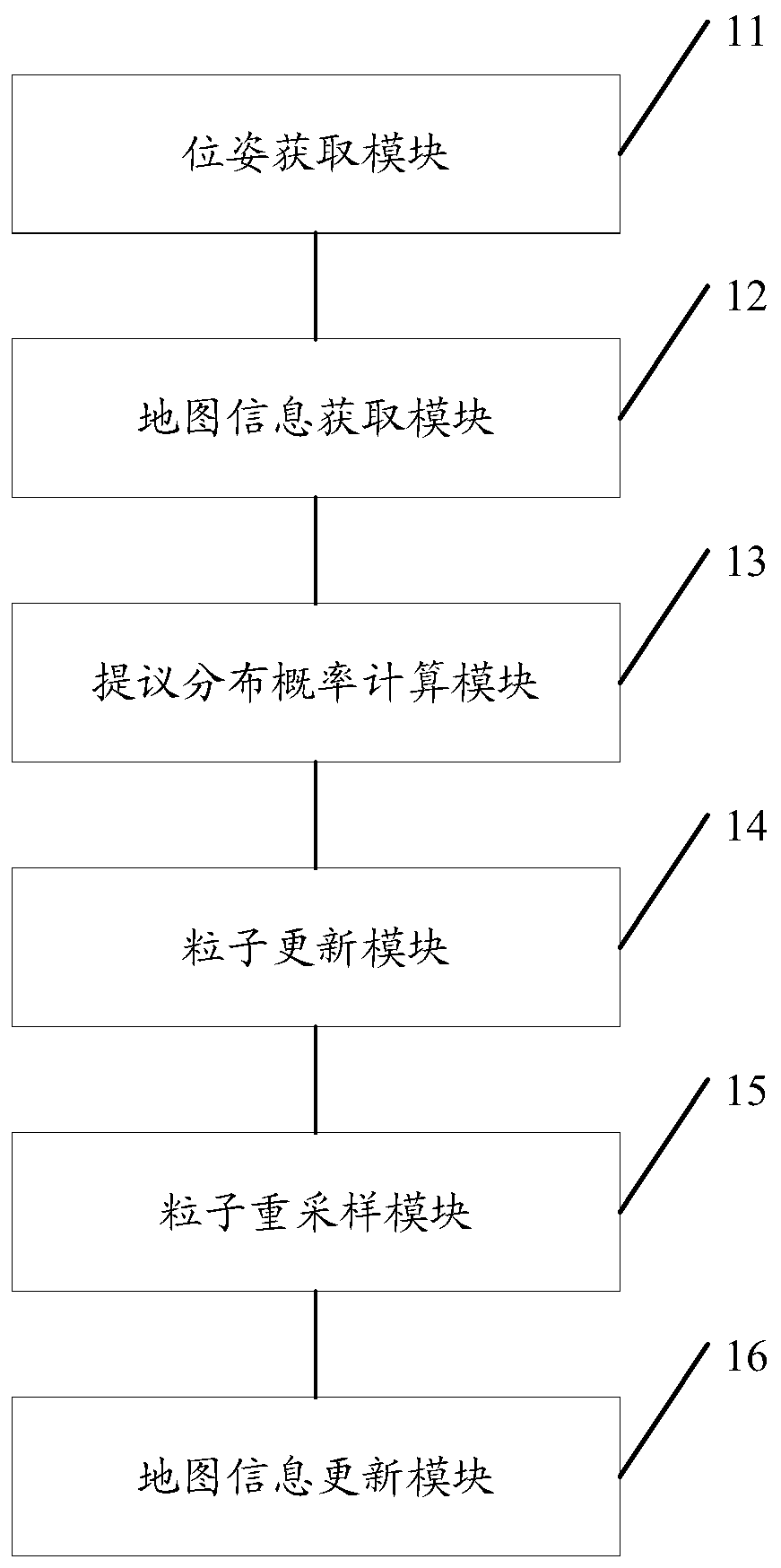
[0053] The particle filter algorithm is an effective means to solve the state estimation problem of nonlinear and non-Gaussian systems. A limited set of weighted particles is selected in the distribution to describe the probability distribution of the state variables, and the weights of these particles will be adjusted appropriately in the subsequent state recursive estimation process; therefore, the SLAM problem can be understood as: Estimating the initial state (map information m 0 with pose x 0 ) given the situation, from the sensor observation information z at the beginning moment 1:k =z 1 ,…,z k Motion information u with robot odometer 1:k = u 1 ,... u k , to estimate the robot trajectory x 1:k =x 1 ,...x k and map information m k The posterior probability of ; RBPF-SLAM algorithm is based on the principle of particle filter, which decomposes the probability description of SLAM into robot pose and the environment feature map under the known pose, as shown in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More