

Device and method of regulating and controlling internal magnetization characteristics of magnetic soft robot
A control device and internal magnetization technology, applied in the direction of magnetic objects, circuits, electrical components, etc., can solve the problems of complex process and high equipment requirements, and achieve the effect of high magnetization efficiency, high magnetization strength and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
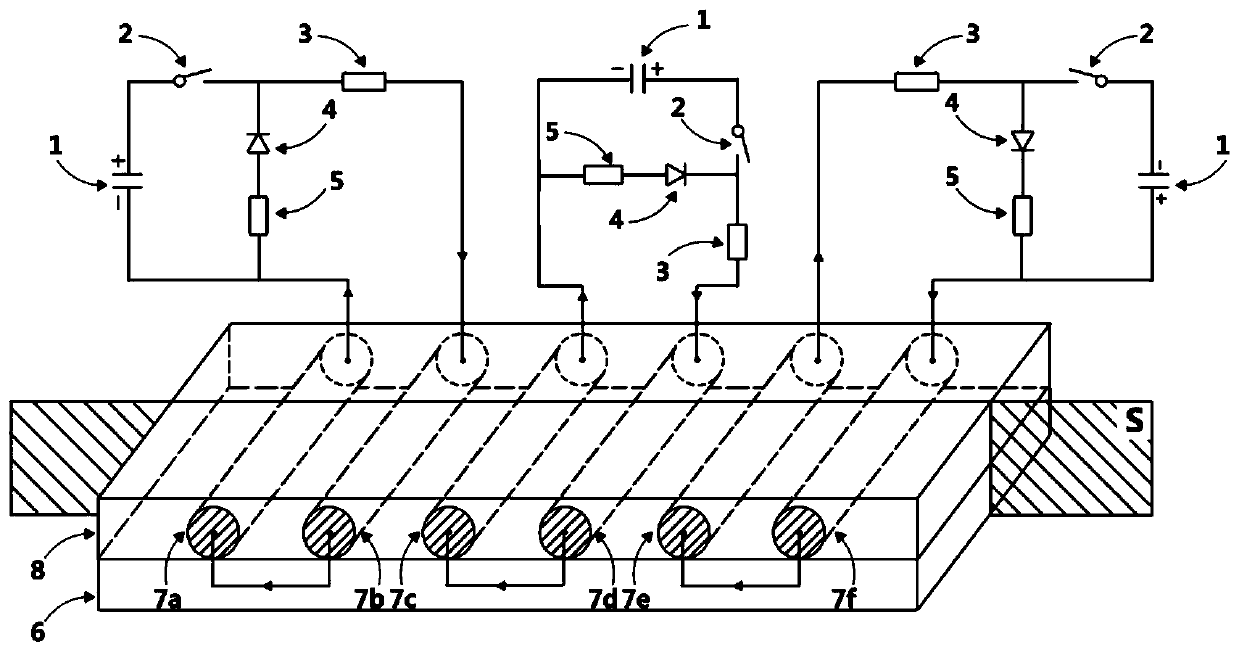
[0045] figure 1 The system three-dimensional diagram of a magnetic soft robot magnetization path regulating device provided in this embodiment includes a power supply system, a magnetization system and a magnetic soft robot 6 .
[0046] The power supply system is composed of three independent discharge circuits, and each discharge circuit includes a discharge capacitor 1 , a discharge switch 2 , a protection resistor 3 , a freewheel diode 4 and a freewheel resistor 5 .
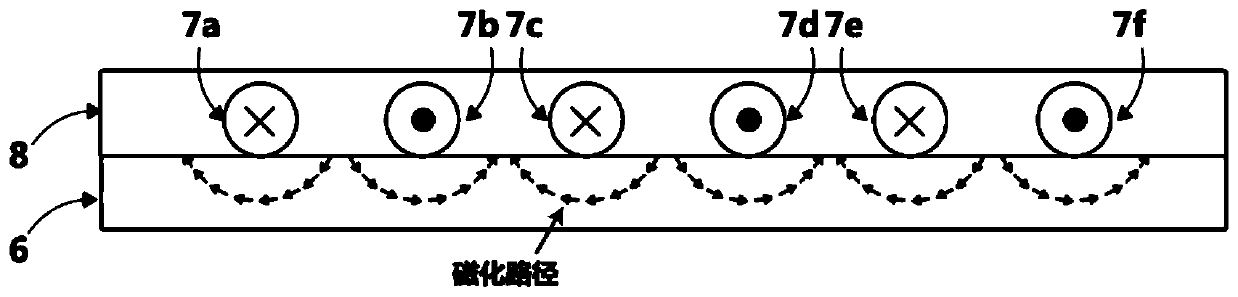
[0047] The magnetization system includes six excitation units, each of which is a long straight wire with a circular cross section, and the distance between two adjacent excitation units is equal. All excitation units are embedded in the fixing member 8 to ensure that the excitation units will not be displaced or deformed under the action of electromagnetic force during the whole magnetization process. Among them, the first excitation unit 7a and the second excitation unit 7b form the first excitation unit gr...
Embodiment 2
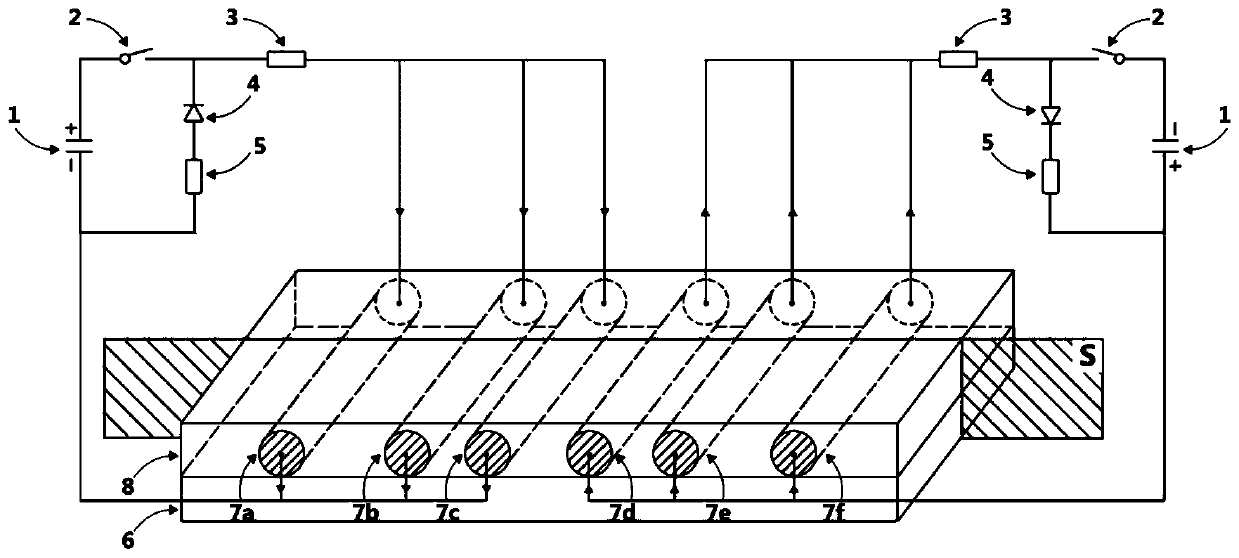
[0050] image 3 The system three-dimensional diagram of a magnetic soft robot magnetization path regulating device provided in this embodiment includes a power supply system, a magnetization system and a magnetic soft robot 6 .
[0051] The power supply system is composed of two independent discharge circuits, and each discharge circuit includes a discharge capacitor 1 , a discharge switch 2 , a protection resistor 3 , a freewheel diode 4 and a freewheel resistor 5 .
[0052] The magnetization system includes six excitation units, each of which is a long straight wire with a circular cross section, and the distances between two adjacent excitation units are not all equal. All excitation units are embedded in the fixing member 8 to ensure that the excitation units will not be displaced or deformed under the action of electromagnetic force during the whole magnetization process. Among them, the first, second, and third excitation units 7a, 7b, 7c form the first excitation unit ...
Embodiment 3
[0055] Figure 5 It is a system three-dimensional diagram of a magnetic soft robot magnetization path regulating device provided by the present invention, including a discharge circuit, an excitation unit and a magnetic soft robot 6 .
[0056] The discharge circuit includes a discharge capacitor 1 , a discharge switch 2 , a protection resistor 3 , a freewheel diode 4 and a freewheel resistor 5 . The excitation unit 7 is a solenoid coil with an S-shaped structure, and the two ends of the coil are connected with the discharge circuit to form a closed loop. The excitation unit 7 is placed above the magnetic soft robot 6, and the distance between the two is several millimeters. In this connection mode, the discharge capacitor 1 is charged, and the discharge switch 2 is triggered to be turned on after the charging is completed. At this time, the pulse current flows in from the right side of the solenoid coil and flows out from the left side. According to the right-hand rule, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More