

Full path planning and breakpoint endurance method for unmanned rice transplanters
A technology of unmanned driving and rice transplanter, which is applied in the direction of motor vehicles, navigation calculation tools, two-dimensional position/channel control, etc., and can solve the problems of low accuracy error of breakpoint endurance and pressure loss of rice seedlings, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The technical solutions of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
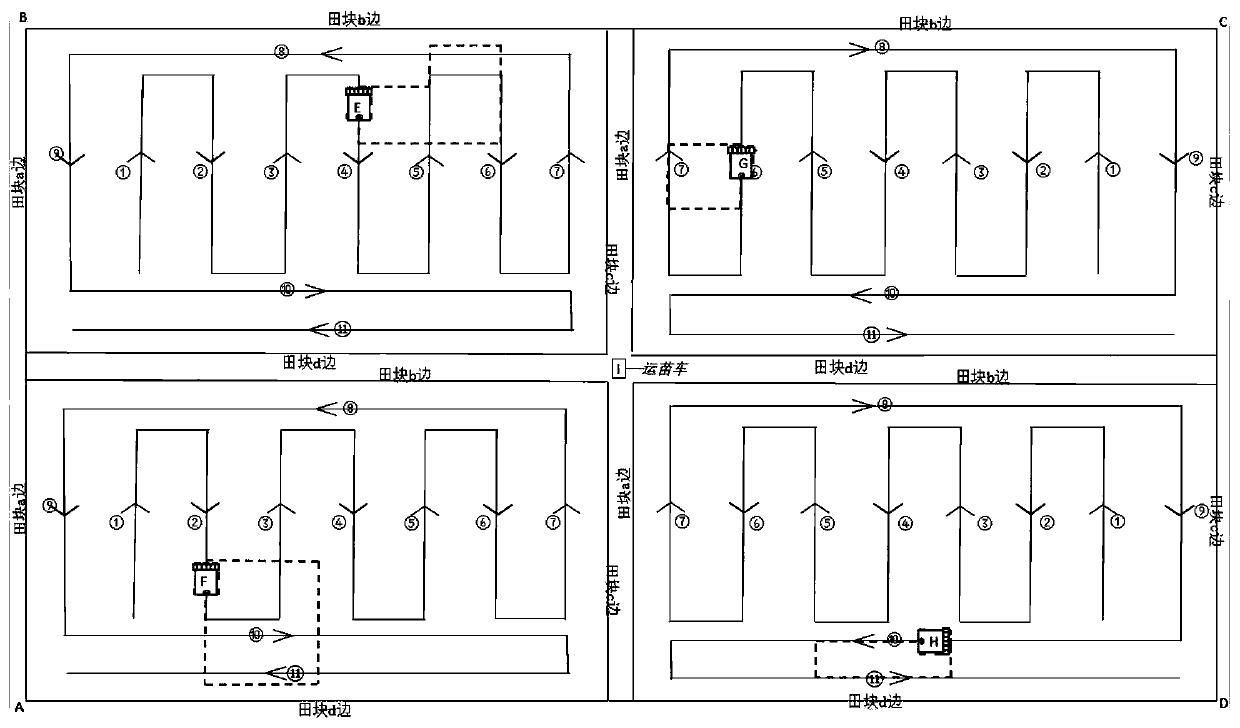
[0082] Such as figure 1 As shown, it is a general schematic diagram of the whole path planning of the sub-regions of the Daejeon block, the breakpoint continuation path planning and the cooperation with the seedling transport vehicle; the method of the present invention includes the following steps:
[0083] Step 1, get the vertex coordinates of the desired work area and calculate the width of the short side and long side:
[0084] Use the Beidou / GPS navigation and positioning device to obtain the vertex coordinates of the work area. Considering that the general mechanized rice transplanting field is a parallelogram or close to a parallelogram shape, calculate the length j of the long side and the length of the short side according to the obtained vertex coordinates of the field. k;
[0085] Step 2: Divide the lar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More