

Chewing robot simulating masticatory muscle group and temporal-mandibular joint
A temporomandibular joint and chewing robot technology, applied in the field of bionic robots, can solve the problems of large space occupation, force and power fluctuations, poor compliance, etc., and achieve the effect of reducing assembly accuracy requirements, overcoming vibration and impact, and fast response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
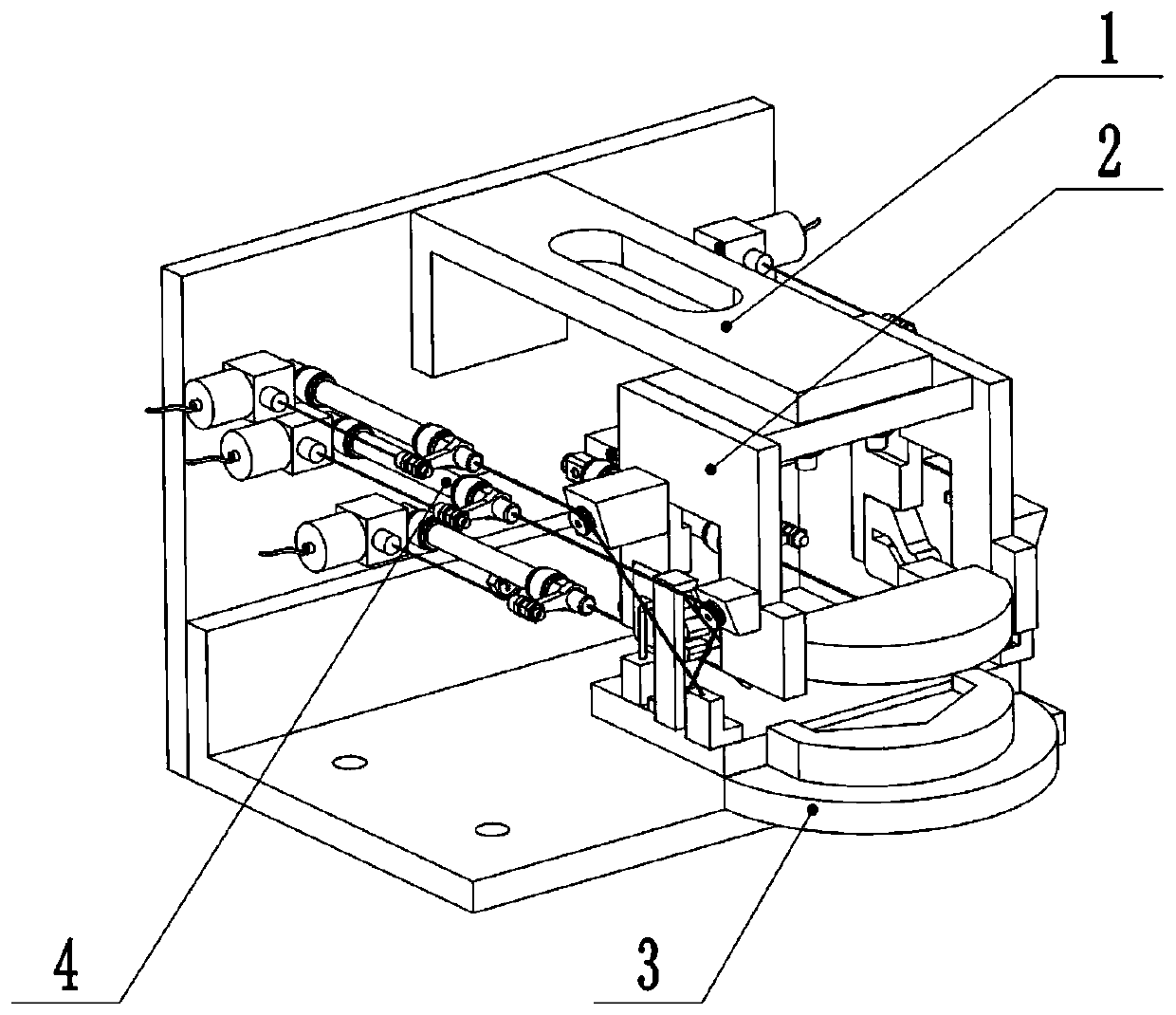
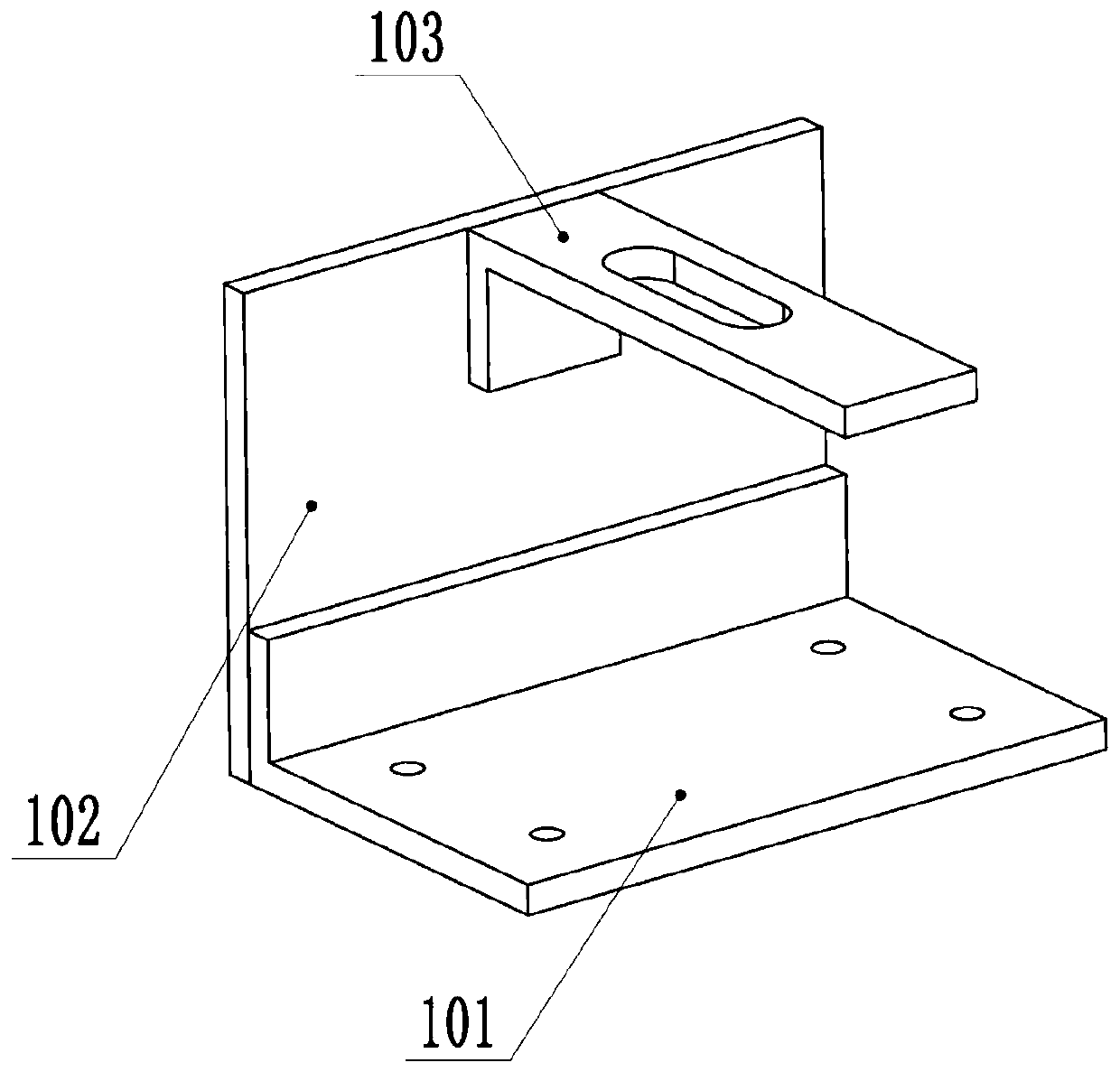
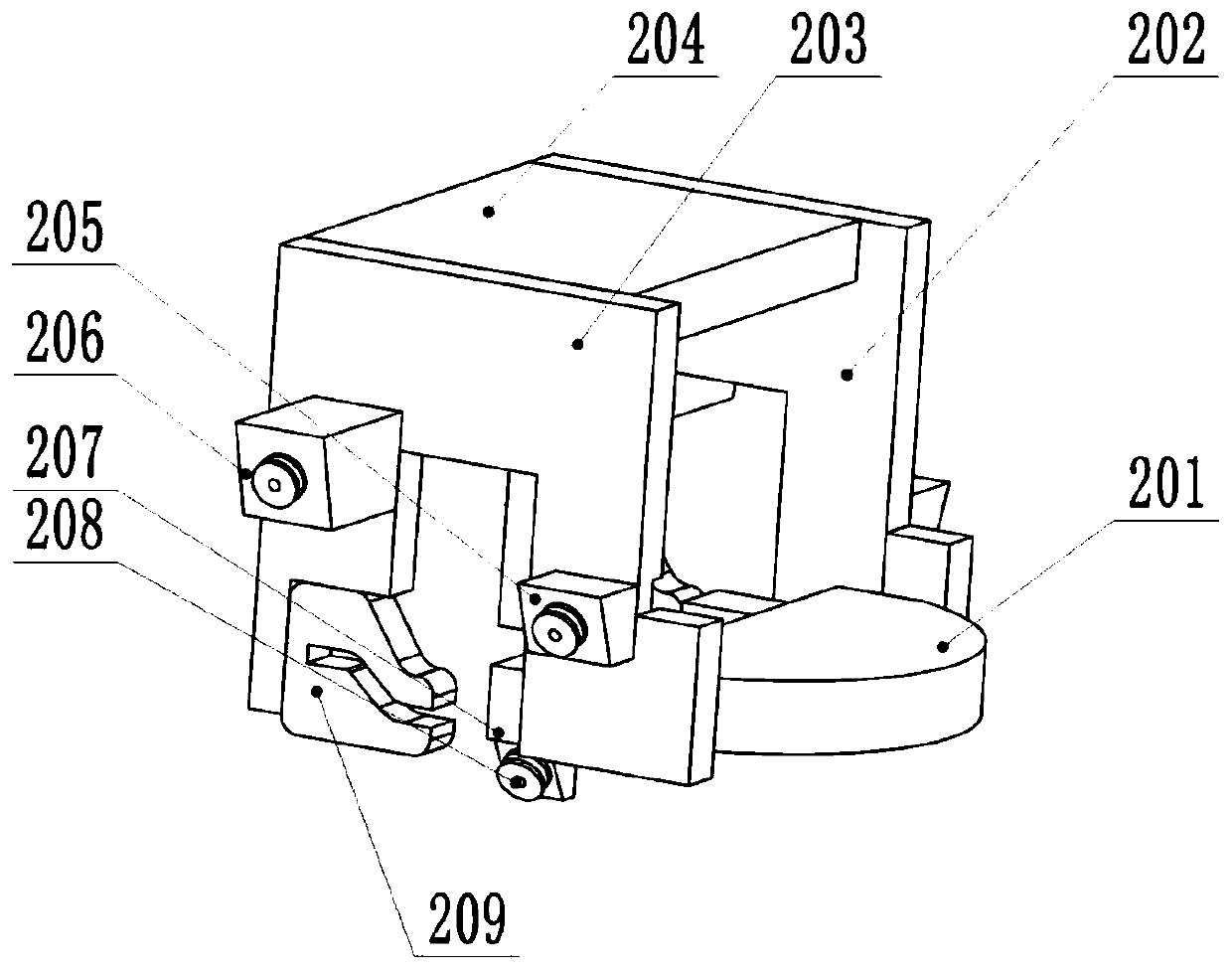
[0032] Such as Figure 1-7 As shown, a chewing robot with masticatory muscles and temporomandibular joint bionics according to the present invention is composed of a main body bracket 1, an upper jaw structure 2, a lower jaw structure 3, six left and right symmetrically distributed drive branch chains 4 and a pneumatic control system 5. . The main body frame 1 serves as a static base support for the driving branch 4 and the maxillary structure 2 . There are two connections between the maxillary structure 2 and the mandibular structure 3, including the slideway-ball contact of the elastic temporomandibular joint and the rope connection of the drive branch chain. The driving branch chain 4 is composed of pneumatic muscles and ropes connected in series. The pneumatic control system 5 provides a controllable power source for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More