

Two-dimensional tracking robot spraying programming method
A programming method and robot technology, applied in two-dimensional position/channel control, instruments, spraying devices, etc., can solve the problems of increased robot positioning distance, high equipment investment cost, and increased spray booth space, etc., to achieve robot Reduced loss, improved work efficiency, and reduced wire speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
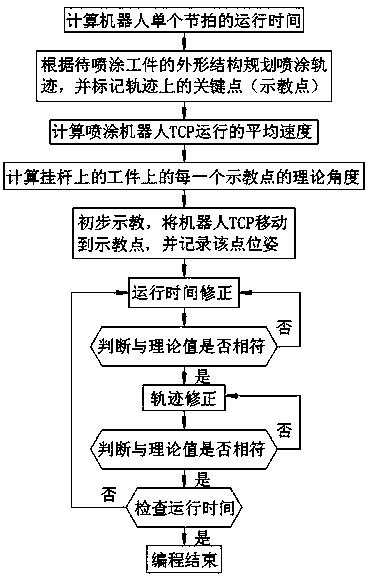
[0031] refer to figure 1 , 2 , a two-dimensional tracking robot spraying programming method, comprising the following steps:
[0032] (1) Calculate the running time of a single beat of the robot: from the time when the workpiece reaches the spraying area, the workpiece moves in parallel with the conveyor chain and rotates around the hanging rod. The production beat is obtained by dividing each pitch S of the conveyor chain by the chain speed V, The workpiece rotates with the hanger in place at a constant angular velocity for one circle (360°), the corresponding time is T, and the theoretical running time T of a single beat of the robot is calculated. 0 ;
[0033] (2) Plan the spraying trajectory according to the shape and structure of the workpiece to be sprayed, and mark the key points on the trajectory: take the key points as the teaching points, the workpiece is rotated in situ for trajectory teaching, and the instructions required for spraying are marked on the workpiece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More