

Mobile robot synchronous positioning and map building method
A mobile robot, synchronous positioning technology, applied in instrumentation, 3D modeling, surveying and navigation, etc., can solve the problems of numerical instability and large amount of calculation, and achieve the effect of improving position estimation accuracy and construction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
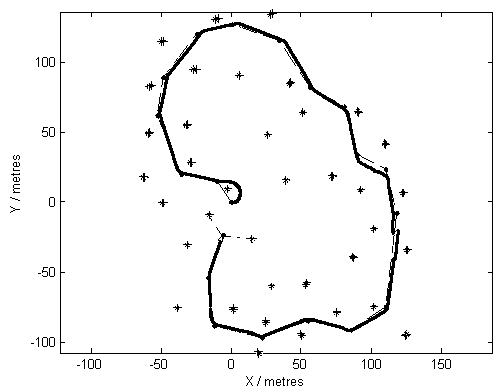
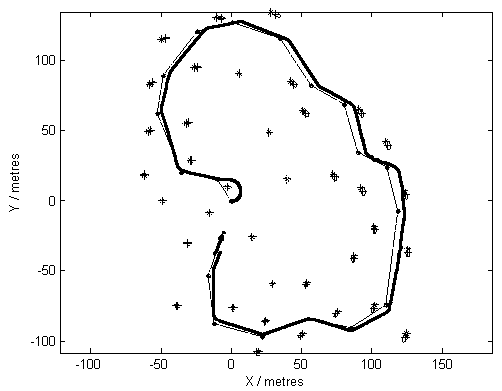
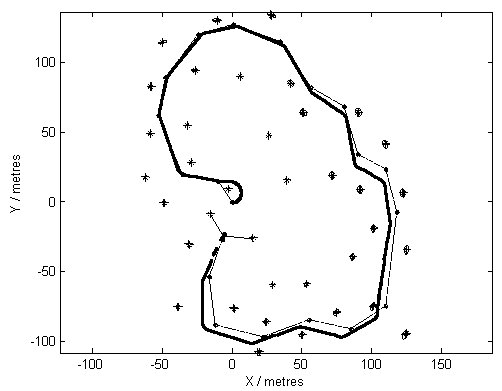
[0051] The preferred embodiments of the present invention are given below, and are described in conjunction with the accompanying drawings and simulation examples.
[0052] The object of the present invention is achieved through the following steps:
[0053] (1) Establish a system model, including robot motion model, observation model, and environmental feature model; and convert the colored process noise model into a Gaussian white noise model. details as follows:
[0054] I. Constructed robot motion model
[0055]
[0056] where, enter x vx,k ,x vy,k ,x vθ,k is the pose of the robot at time k, x vx,k , x vy,k Indicates the position coordinates of the robot at time k, x vθ,k Indicates the heading of the robot at time k; ΔT is the sampling time of the dead reckoning sensor, V k+1 is the speed of the robot at time k+1, φ k+1 is the rudder angle at time k+1, and B is the wheelbase between the two axes of the robot car. output x vx,k+1 is the pose of the robot at ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More